
CONTENTS
INTRODUCTION
販売開始2年で国内70施設 200台稼働
BEGINNING
超高齢社会の到来で期待されるロボット技術
BREAKTHROUGH
正しい生体電位信号を読み解くFOR THE FUTURE
安全安心が保証されてこそ、技術は普及する
FACE
60年後の為に、今やるべきことロボット・AI・福祉機器
次世代ロボット実用化プロジェクト意思を読み取り自立動作をサポート 福祉の現場で期待を集めるロボットスーツ HAL®
CYBERDYNE株式会社(サイバーダイン)
取材:January 2011



INTRODUCTION 概要
販売開始2年で
国内70施設 200台稼働
わが国は、他の国に例を見ないスピードで超高齢社会へと進んでいます。加齢や病気で体の一部に不自由を抱えることになっても活き活きと活動したい、それは誰もが願っていることでしょう。同時に、体が不自由な人を支援したり、介護したりすることも、日常生活の一部として行われるようになってきました。そこで、注目されるのが、わが国自慢のロボット技術です。何らかの理由で不自由になった身体機能をロボット技術で補助したり、介護者の負担を軽減したりなど、ロボット技術の活用に熱い期待が寄せられています。NEDOではこうした社会で役に立つロボット技術の開発を20年以上に渡り、進めてきました。筑波大学発のベンチャー企業である「CYBERDYNE株式会社(サイバーダイン)」では、NEDOのプロジェクトを通して、少子高齢社会の期待に応える、動作支援ロボット「ロボットスーツHAL®福祉用」を開発し、全国の医療機関や介護施設などへレンタルやリース販売を始めています。
BIGINNING 開発への道
超高齢社会の到来で期待されるロボット技術
2009年10月1日現在、わが国の65歳以上の高齢者人口は2901万人を数えます。これは、わが国の総人口の22.7%にあたり、日本は、すでに5人に1人が高齢者の国となっています。高齢者の数は今後も増え続け、2055年には、2.5人に1人が65歳以上という、文字通りの「超高齢社会」となることが、予測されています。
超高齢社会に備え、大きな課題となっていることが、高齢者の生活支援や、生活の質(Q.O.L)の向上です。特に、加齢や病気、怪我などで体の機能の一部が不自由な高齢者や、高齢者でなくとも障がいを抱える人のQ.O.Lの向上は、わが国の将来にとって、緊急の課題になっています。そのためには、体の失われた機能や障がいある症状を出来る限り補うリハビリテーションや装具などの充実とともに、介護をする人材の不足や、介護労働の負担を軽減することが重要になってきます。これらの問題を解決するために、日本が得意とするロボット技術への期待が高まっています。すでに、上肢の不自由な人が、家族や仲間と一緒に食事が出来るように支援するロボットなどが実用化されています。
NEDOでは、ロボットをこうした福祉や介護の分野で大いに活用しようと、様々な視点や切り口から研究開発プロジェクトを立ち上げ、「人に役立つ」ロボットの実用化を積極的に支援しています。
2005年、愛知県で開催された「愛・地球博」では、2010年〜2020年に活躍が期待されるロボットを広い分野から発掘、選定し、70種を越えるロボットが、博覧会開催中にデモンストレーションを行いました(「次世代ロボット実用化プロジェクト」2004〜2005年度)。
引き続き、福祉介護分野で期待されるロボットについて、医療機関や介護施設などのユーザーの声を取り入れながら「人間支援型ロボット実用化基盤技術開発」プロジェクト(2005~2007年度)を行い、開発した8種類のロボットすべてについて、実際のユーザーによる実証試験に至りました。現在は、単なる技術開発だけでなく、人と接するロボットの安全性を実証し、安全基準づくりと国際標準(ISO)への提案を目指す「生活支援ロボット実用化プロジェクト」(2009〜2013年度)が進められています。
ロボットスーツHAL®福祉用の登場
ロボットスーツHAL®福祉用も、永年の独自の研究成果を基に、こうしたNEDOの研究開発プロジェクトの支援を活用しながら、2010年4月にリース/レンタル販売へとたどり着くこととなりました。
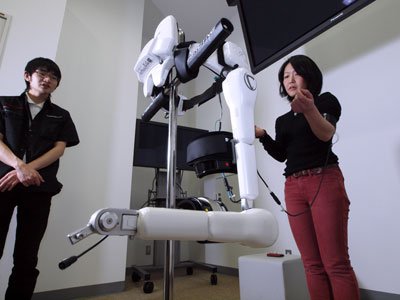
ロボットスーツHAL®福祉用は、人の歩こうとする意思を読み取り動作を補助する、全く新しい装着型のロボットです。見た目は、写真の通り、いわゆる2足歩行用ロボットや産業用ロボットと違い、どちらかと言えば、義肢や装具を思わせるものです。
義肢や装具との大きな違いは、人が筋肉を動かそうとしたとき、脳からの指令が筋肉に伝えられる際に皮膚表面に現れる意思を反映した微弱な生体電位信号を感知して、各関節に装備されたモーターや制御機器が作動して、人間の動作を助けてくれることです。例えば、下肢に麻痺があり、思うように足が動かなくても、HAL福祉用は、生体電位信号を検知することによって、装着者が立ち上がったり、歩行したりすることを支援してくれます。生体電位信号を検知すると言っても、特別な装置を頭や皮膚に埋め込むのではなく、ごく簡単なセンサーを貼るだけでよいことも、HAL福祉用の大きな特色です。
このロボットスーツ®を開発したのは、筑波大学大学院システム情報工学研究科の山海嘉之教授です。「工学は人に役立つものでなくてはならない」との信念で、20年の歳月をかけて、HALの研究開発に一から取り組み、自らCEOとなり、ベンチャー企業(CYBERDYNE株式会社)を起業して商品化を実現、身体に装着する世界初のサイボーグ型ロボット「ロボットスーツHAL®」のレンタル及びリースによる販売を開始しました。
すでに、国内約200台が稼働中で、医療機関や介護施設などで、医師、理学療法士等の指導の下、動作支援に使用され、効果を上げ始めています。

茨城県つくば市のサイバーダインスタジオ内にある、トレーニング施設、「HAL FIT™」でのトレーニングの様子。片麻痺のある利用者がHALを装着することでトレッドミルの上を歩く訓練ができるようになった

HAL福祉用の(左)とその搬送パッケージ。
「ロボットスーツHAL®」とはどんなロボットか?
「ロボットスーツHAL®福祉用」は、一言で言えば、「人の意思を読み取り、人の動きをサポートするロボット」です。「ロボットスーツHAL®福祉用」は、大きく分けて人間の脚部に当たるパーツと腰部に当たるパーツに分かれています。
脚部に当たるパーツでは、大腿部、下腿部のそれぞれが駆動・制御・センサー機能を組み込んでユニット化されています。ロボットスーツHAL®福祉用には、両脚をアシストする両脚型と、片脚をアシストする単脚型があります。また、装着者の体型に合わせて基本サイズを選択、長さや関節の開き角度を調節することもできます。
各関節に設けられた制御的なストッパーを調整することで、可動域制限のある装着者に装着する場合であっても、無理な動きを強いることがないように配慮されています。
腰部のパーツには、コントロールユニット、操作やパラメータの調整を行うスイッチなどが組み込まれ、バッテリーを取り付けます。コントロールユニットには、各種の計測データ(生体電位信号や関節角度など)が転送されてきます。また、左右の腰に主電源スイッチ、アシスト量の調整スイッチなどが配置されています。
また、生体電位信号を得ることはもちろん、動作状況を確認、機械の安全性確保のためなど、多数のセンサーがHAL福祉用には取り付けられています。
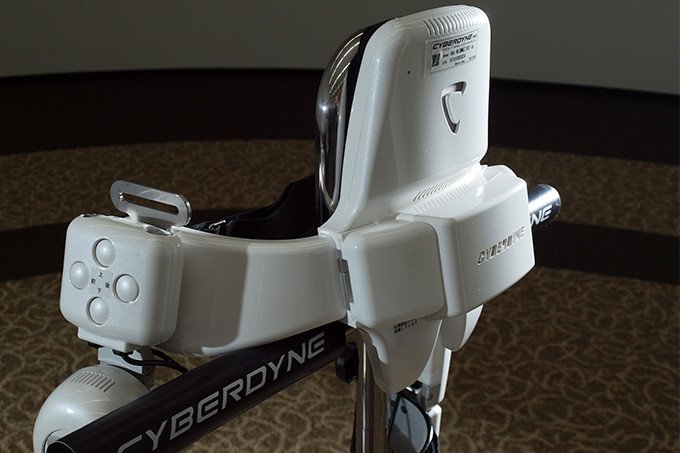

図1 ロボットスーツHAL®福祉用の装着例と各部名称。
脚力が低下した人や、病気・怪我などで下肢の運動機能に障がいある人が身につける第2の骨格のようなロボット。両脚モデル(写真)で11kg、単脚モデルは6kg。本体が床面に設置して重量を支える構造になっているため、身に着けた人が重みを感じることはない
「ロボットスーツHAL®」の開発史
「研究は学術的な成果ばかりでなく、社会に貢献できなければ…」山海教授が、そう考えて、専門分野である工学を社会のために活かすために考えついた一つの形が、ロボットスーツHAL®でした。
どうすれば人の意思を正確に感知できるのか、HALの研究開発を始めた1991年から数年間は、HALの基本原理を確立するために、最初は、小動物を使って、神経系や生体電位信号の解析を行いました。1995年には、基礎実験装置が完成し、皮膚の表面で人の意思を反映した生体電位信号をとらえ、これを用いて基礎システムを制御できるようになりました。
1997年、試作1号機(HAL-1)ができあがってきました。しかし、山海教授は、「この試作機は、生体電位信号を捕らえれば人の意思を感知できる、という基本原理が、正しいかどうかを検証するための下半身用ロボットスーツ。とても人にお見せできるものではありませんでした」と振り返ります。実際、HAL-1は無数の太いケーブルが、巨大なコンピューターや制御装置につながれ、それでも確実に動くとは限らず、実用化にはほど遠いものでした。
しかし、それから5年後に発表された試作3号機(HAL-3)で、HALは飛躍的進歩を遂げました。動力を蓄電池に変え、コントロールコンピューターを小型化し背負わせたことで自由度が増し、それを証明するために、世界中を旅してデモンストレーションを行いました。その目的は、どんな環境においても動作することを証明するためでした。
このHAL-3が、HAL開発において果たした役割は大きく、現在も、サイバーダインの先端福祉機器展示・体験施設とトレーニング施設HAL FIT™のある、茨城県つくば市の「サイバーダインスタジオ」に展示されています。

サイバーダインスタジオに展示されているHAL-3(左)と最新の試作5号機(HAL-5)(右)
「愛・地球博」をめざしたNEDOのプロジェクトに参画
2004年には、前述のNEDO「次世代ロボット実用化プロジェクト」の一つにこのロボットスーツHALの開発が採択されました。その一環として、2005年の「愛・地球博(愛知万国博覧会)」で、来場者の前でデモンストレーションを行うこととなり、そのために開発されたのが試作5号機(HAL-5)でした。万博開幕の期日もあり、従来にない短い開発期間ながら、一般の来場者の目にも触れると言うことで、完成度についても従来にない高い試作機となりました。そして、このHAL-5の技術が、HAL福祉用にも応用されています。
HAL-5は、これまでに開発されてきた下肢用のロボットスーツに、新たに上肢用ロボットスーツを組み合わせた全身型で、さらに、制御を担ってきたコントロールコンピューター機能を、関節などボディーの各部に分散さることにも成功。コントロールコンピューターの小型化で、身につけやすく、デザイン性にも優れた、だれもが着けてみたい、見た目にも格好の良いモデルが完成しました。
「愛・地球博」では、HAL-5の上半身と下半身のパワーを同時に見てもらうため、30kgの重量物を両手で持ってスクワットするデモンストレーションを行いました。山海教授は、「合計42回のデモンストレーションを無事やり遂げました。気の抜けない毎日でしたが、その分だけ、HALの運用方法を実践的に研究することができました。医療・福祉分野でロボットを実用化するためには、同時に運用技術を作り上げていく必要があります。この時の経験は、現在のHALの運用管理システムを考案する上で、非常に役に立ちました。」と語ります。

「愛・地球博」でのデモンストレーション
写真提供: Prof. Sankai University of Tsukuba / CYBERDYNE Inc
いよいよ福祉の現場へ
「愛・地球博」以降、HALの開発は、NEDOプロジェクト「人間支援型ロボット実用化基盤技術開発(2005~2007年度」によって、"足の筋力が衰えた高齢者や障がい者のアシスト"に開発目標を絞って進められました。それまでの原理検証などのステージから、プロトタイプ製作・実証試験のステージに移り、実際に支援が必要な人を対象とするため、研究開発のプロセスも、より多くのことを考慮しながら行う必要がありました。例えば、実証試験を行うためにも、技術開発だけでなく、事前に安全面・倫理面をしっかり検討することが求められます。
「人間を支援するロボットの医療・福祉分野への導入は、これまでに例のない取り組みでしたから、NEDOプロジェクトに参加することで、ユーザー、医療専門家、安全・倫理の専門家と一体となって課題に取り組むことができ、自信を持って進むことができました。特に、必要に応じて、迅速に安全や損害保険の専門家の検証をうけられる体制を整えてくれたNEDOのマネジメントはとても有り難いものでした。」と山海教授は同プロジェクトを評価します。
また、このプロジェクトの中で、HALの技術は実用化に向けて大きくブラッシュアップされました。HAL5号機の基本原理を受け継ぎながら、HAL福祉用では、実用のために、様々な改良が加えられています。例えば、装着者と一体となって動作するHAL福祉用では、装着者それぞれの体形にあわせるため、基本となるサイズを3種類用意し、ウエストや膝上・膝下の長さを微調整できるようにしました(写真参照)。また、動作支援機能をユニットごとに分けたり、安全機能・機構を加えたりすることで、たとえ一部が故障しても、全ての機能が失われないように、安全性や耐久性にも配慮が加えられています。

膝下の長さを変えるための機構

腰部のインターフェイスユニット(左)、これらのボタンでアシストレベルを微調整し、装着者にあわせる。歩行の改善が見られれば、アシストレベルを下げる。トレーニングはアシストレベルをモニター(右)で確認しながら行われる
BREAKTHROUGH プロジェクトの突破口
正しい生体電位信号を読み解く
HALには、様々な新技術が導入されていますが、その第一に上げられる点は、生体電位信号を、皮膚の表面から読み取る技術です。
例えば、健康診断で行われる心電図測定では、体を横たえ、安静にして測定します。余計なノイズや信号の乱れを避けるためです。それからもわかるように、生体電位信号はとても微弱で捕らえにくい信号です。また、同じ人であっても、いつも一定の生体電位信号が発信されているとは限りません。皮膚が乾燥しているとき、湿潤な時でも変化します。障がいのある方ではさらに微弱な信号となります。
皮膚の表面では、様々な生体電位信号、あるいは外部からのノイズが重なり、それらを検出・解析するのは非常に難しい技術です。山海教授らは膨大なデータを収集し、解析と実験を繰り返すことで、歩行運動をしながら、なおかつ制御用のコンピューターやモーターなど強い電気信号(ノイズや磁界)を発する機器がある中でも、正確に信号を感知できるセンシング技術、キャリブレーション技術、そして、その信号を解析し、適切に制御できるサイバニック制御手法を実現したのです。

腕を動かそうとする意思を使ってデモンストレーション。
デモ用の生体電位信号センサー(左)を腕に巻いてHALの動きを体験。生体電位信号を捕らえたHALが、腕を動かそうとする意思に従って動く(右)
二つの制御機構を組み合わせて、自然で安定した動きを実現
HALの動作支援で重要なことは、リアルタイムで動作することです。人の「動き」を見ながら(計測しながら)動くロボットでは、人が動かないとロボットは動いてくれないので、筋力の衰えた人のアシストはできません。
「人間の意思に応じてリアルタイムで動作する」ことを可能にしたのがサイバニック制御技術です。これは、生体電位信号から人間の意思を読み取り思い通りに動く「サイバニック随意制御システム」と、人間のような動作を実現することができる「サイバニック自律制御システム」の組み合わせ(ハイブリッド)で機能させるものです。これらのシステムにより、足が動かせない人でも、動かそうとする生体電位が検出できればHALのアシストが受けられ、トレーニングを行うことができます。
「サイバニック随意制御システム」とは、これまで説明してきたとおり、人が筋肉を動かそうとするとき、脳から運動ニューロンを介して神経信号が筋肉に伝わりますが、その際皮膚に現れる微弱な生体電位信号を読み取り、HALと人間が一体となって、人の運動をアシストすることを指します。
しかし、これだけだと、筋肉がありながら運動中枢が損傷している場合などの動作支援が難しいなどの問題があります。そこで、HALでは、「サイバニック随意制御システム」とともに、歩行、立ち上がりなどの運動を行う基本動作をプログラムとして準備し、データベース化された人間の情報と合わせて先読みし、円滑に動作を支援する「サイバニック自律制御システム」を兼ね備えています。
この2つの制御システムをもっていることからも、「Hybrid Assistive Limb ® (2つの制御方法が融合した肢)」、通称「HAL®」と呼ばれるようになりました。
HAL®をつくる新しい学術体系「サイバニクス」
山海教授は、「モーター1つをとっても、"人間の動きに適合するもの"という条件を満たさなければならず、部品開発も容易ではありませんでした。全く新しい技術を、開発から実用化に至らせるためには、常にいくつもの壁を乗り越えなければなりません。ですから、HALの研究開発は、その全てがブレークスルーの連続でした」と語ります。実際HALには、工学分野の電気や電子、機械はもちろん、脳神経科学、生理学、生物、化学、医学、さらには行動心理学まで、実に多様な学術分野の研究成果が盛り込まれています。また、社会への流通には、法律・社会科学や安全規制への配慮も必要であるため、これらの分野も盛り込まれています。
山海教授は、HALの研究開発にあたり、複雑な機構とその斬新性を見越して、こうした様々な学術分野を融合させる新しい学術大系をあらかじめ想定し、研究を進めてきました。それが「サイバニクス」と呼ぶ学術大系で、この大系の基、HALの開発や実用化、販売はもちろん、後進となる技術者、研究者の養成にも力を入れています。
FOR THE FUTURE 開発のいま、そして未来
安全安心が保証されてこそ、技術は普及する
サイバーダイン社による直レンタル販売を始めて約1年余り、山海教授は現在のHAL福祉用を、医療機関や介護施設などで、医師や理学療法士が使用する「プロユーザー」向けと位置づけていると話します。今後は、エンドユーザーに向けて普及していきたいと考えています。
山海教授は言います。「そのとき、一番重要なことは、新たに生まれた革新技術が、社会の中で育ち、未来を開拓できるような道筋をつくってやることです」 道筋づくりとは、「生み出された新技術が安心して使え普及する技術としてしっかりと育っていくことができる社会の受け入れ体制・育成体制を整えること」だと山海教授は説明します。山海教授らは、現在、NEDOの「生活支援ロボット実用化プロジェクト」で、ロボットの安全性や安全技術の開発に取り組んでいます。
HALのような福祉用ロボットは、病気や年齢のために体が不自由な人が使うものなので、技術的に優れているだけでなく、その人たちが安心して使えるものでなければなりません。しかし、どのようなものでも、トラブルが絶対に起こらないと言うことはできません。それゆえ、リスクマネジメントが重要なのです。
HALでは、開発当初から、「本質安全」や「機能安全」といった安全に関わる技術も同時に開発してきました。HALは、万が一誤作動が起きても、人を傷つけるような事故につながらないように、必要以上のパワーが出ないように設計されています。これが、本質安全です。その上、機能安全では、一箇所が壊れたからといって不安定な動作とならないように、多重の安全機構がとられていて、どんな場合でも安全に停止できるようになっています。今後は、安全技術に関しても世界をリードしていきたいと考え、国際標準を目指して日々研究開発に取り組んでいます。

最新バージョンのHAL福祉用

サイバーダインスタジオにあるHAL FIT™には様々な障がいを抱えた利用者が訪れる。全国で利用されているHAL福祉用はオンラインでデータが集められ、日々改良に役立てられている
広がりをみせるHAL®による新しいトレーニング
ロボットスーツHAL®福祉用は、全国約70カ所の医療・福祉機関で導入されており、ある利用者からは「HALを装着すれば健常なころとほとんど変わらないペースで歩ける」などの声も届いています。
また、つくば市にあるHAL FIT™では、2010年8月のオープンから半年の間に、延べ390人がHALを体験しました。ロボットスーツHAL®福祉用は、各々の身体状況に合わせてアシスト量を最適化することが可能なため、座った状態でのトレーニング、立ち上がりの補助など、装着者の状態に応じて様々な活用ができます。
トレーニングによって、筋力がついてくれば、アシスト量を減らし、装着者自身の歩行力を活かした次の段階のトレーニングも可能です。リピーターの中には、HALを装着しても5人がかりで支えてやっと歩いていた状態から、筋力がついて何とか自分で足を運べるようになった人もいます。
何よりも、HALを装着し、"自力で歩ける"という体験が、下肢に不自由を抱え、歩くことをあきらめかけてしまった人を元気づけ、再び歩くことへの意欲の大きな原動力となっています。
国際ビジネスへの展開を目指して
「自動車やテレビが開発以来ずっと進化を続けているように、HALも完成形ではありません」。今なお、小型化や高性能化の試みは続いています。山海教授はさらに、福祉用ロボットの分野で世界をリードしていきたいと考えていて、特に、福祉大国が多いヨーロッパを中心に世界展開を始めています。
そのためには、HALの進化も世界レベルで行っていかなければならないと考え、また、スウェーデン、デンマーク、ドイツ、フランスなどとの連携や現地法人の設立を進めてきました。更に、2011年中には、ドイツでデザインコンテストが開催される予定となっています。山海教授は、世界の一流デザイナーや技術者から提案されたデザインや部品、構造などの中から、最も優れたものを採用していく考えです。
絶え間ない進化と、安全性やコストダウンの追求の先に、HALを身に着けて、誰もが気軽に散歩に出かけられる未来が、少しでも早く訪れることが期待されます。(2011年1月取材)
開発者の横顔
60年後の為に、今やるべきこと
ロボットスーツHAL®には、開発者の山海教授の科学技術の進歩に関する考え方が、よく現れています。
「小学校3年生のときに読んだ、アイザック・アシモフ著の『I Robot(われはロボット)』の時代設定は、2008年の世界でした。当時から数えて40年後のことです。私たちはすでに、その年を過ぎてしまいましたが、少年時代に考えたことは、未来を思い描けば、いつかそこに立つことができるということです」
山海教授が、常に50年後、60年後の未来を見据えて、今やるべきことを模索し、それが、HALという1つの形になったのも、こうした科学に対するスケールの大きい時間感覚によるものでしょう。
しかし一方で、山海教授は、必ずしもHALだけを見据えていたわけではないとも言います。人や社会が好きで、自分の専門研究や技術を活かして、社会に役立つものをつくりたかっただけ、そうした思いが、人が直接身につけるロボットスーツという、他に例のないロボットになったと説明します。
山海教授は言います。「研究開発を進める人間には、夢や情熱のほかにもう1つ、人を思いやる心が必要なのです」
HALの研究開発だけでなく、HALを通して社会に役立つ技術者や研究者を育てることこそ、自らの夢であり、役割だと、山海教授は熱く語ります。
CYBERDYNE株式会社(サイバーダイン)
山海教授
なるほど基礎知識
HAL®はどのように人の意思を感じているの?
HALはどのようにして、人の意思を感知しているのでしょうか。それを知るには、私たちの体がどのように動いているかを理解する必要があります。例えば、足を曲げる場合、"足を曲げる"という指令が脳から電気信号として出されます。この電気信号が神経細胞を通って足の筋肉に到達することで、足を曲げるという動作がおこります。
このとき皮膚表面に生体電位信号が現れます。HALは、この生体電位信号を捕らえて動きます。生体電位信号を捕らえるセンサーは、足の曲げ伸ばしに関わる筋肉の皮膚表面に貼ります。僅かな生体電位信号をセンサーで捕らえられれば、ロボットスーツが駆動し、思い通りの動作が実現します。
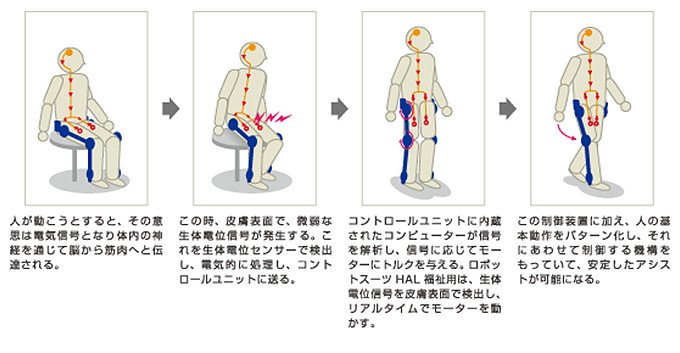
図a ロボットスーツ「HAL」福祉用の動作原理
お読みいただきありがとうございました。
ぜひともアンケートにお答えいただき、
お読みいただいた感想をお聞かせください。
いただいた感想は、
今後の連載の参考とさせていただきます。