
CONTENTS
INTRODUCTION
日本発の国際安全標準BEGINNING
“生活支援ロボット”実用化への期待と課題BREAKTHROUGH
世界初の生活支援ロボット安全検証センターFOR THE FUTURE
安全研究に終わりはないFACE
このロボットに何をやらせたいのかを問い続けるロボット・AI・福祉機器
生活支援ロボット実用化プロジェクト安全安心な生活支援ロボットの開発を支える規格と認証体制を整備
産業技術総合研究所、一般財団法人日本自動車研究所、名古屋大学
取材:December 2016、February 2017



INTRODUCTION 概要
日本発の国際安全標準
日本では、少子高齢化による人手不足をロボットで補おうと、介護や家事の一部をサポートする“生活支援ロボット”の開発が盛んです。こうしたロボットの実用化を目指して、2009~2013年度にNEDOは、「生活支援ロボット実用化プロジェクト」を行いました。プロジェクトでは世界に先駆けて、生活支援ロボットの安全性検証手法の研究開発を実施しました。ここでの成果は、パーソナルケアロボットの安全に関する「ISO13482」の発行に大きく貢献しました。さらにプロジェクトでは、安全検証センターを開設するなど、安全性検証のための体制作りも行われ、ここで試験を受けたロボットたちが、今まさに、私たちとともに暮らしはじめようとしています。
BIGINNING 開発への道
“生活支援ロボット”実用化への期待と課題
少子高齢化が進み、社会を支える人材の不足が心配されています。ロボット開発が盛んな日本では、この人手不足をロボットによって補おうと、多くのメーカーが、介護や家事などの一部を代替する「生活支援ロボット」の開発に力を入れてきました。
2005年に開催された愛知万博では、当時のロボット開発の活況ぶりを、生物の大爆発が起こったカンブリア紀になぞらえ、“ロボットのカンブリア紀だった”と、振り返る人がいるほど、さまざまなロボットが登場しました。
その背景には、従来からの日本におけるロボット開発の歴史だけでなく、NEDOが1998年度から継続的にロボット開発のプロジェクトに取り組んでいたことがありました。とくに、愛知万博当時は、「次世代ロボット実用化プロジェクト」に取り組んでいて、実に70種類以上のロボットを開発・発表しました。
「メーカーから“ロボットはつくれるようになったけれど、安全性が評価されていないから世の中に出せない”という声が聞こえてきました」と話すのは、国立研究開発法人産業技術総合研究所(AIST)ロボットイノベーション研究センターの大場光太郎さん。同研究センターの所属でプロジェクトのリーダーであった比留川博久さんとともに、「生活支援ロボット実用化プロジェクト」を率いてきた人物です。
「愛知万博では、多くの来場者がロボットと触れ合いましたが、特に問題は起こりませんでした。それを支えていたのは、各ロボットに専属で付いた安全担当者でした。彼らは、リスクアセスメントをして各ロボットに潜むリスクを知り、陰ながらロボットの安全確保に尽力していたのです」(大場さん)
この経験を通して、ロボットが人と接する際に必要な安全基準が明らかになり始めていましたが、一方で、家庭に生活支援ロボットを送り出したいメーカーには、その安全性をどう検証するかが問題になりました。
当時、多くのメーカーが、技術的にはロボットを製造できるようになっていましたが、今後もロボット事業を続けていけるかは、実用化の見込みがあるかどうかで決まろうとしていました。実用化の是非を握っていたのが、ロボットの安全性だったのです。こうして、ロボットの安全性を検証する“公的な機関”を求める機運が高まっていきました。
「安全とは何か」を理解することから始まったプロジェクト
ちょうどその頃、当時、AISTの研究者だった名古屋大学の山田陽滋教授も、ロボットの安全に関する制度を整えなくてはならないと訴え、そのためのプロジェクトを立ち上げようと動き始めていました。
山田教授は、元々、人間とロボットの共存のための研究をしており、福祉介護分野でロボットを利用することを想定して実施された「人間支援型ロボット実用化基盤技術開発」(2005~2007年度)や「戦略的先端ロボット要素技術開発プロジェクト」(2006~2010年度)など、いくつものNEDOプロジェクトに関わってきました。こうして実際のロボット開発に関わって、安全性検証の必要性を強く感じるようになったと言います。
山田教授の訴えを、メーカーからの声が後押しする形で、2009~2013年度に、NEDOプロジェクト「生活支援ロボット実用化プロジェクト」が行われました。プロジェクト名には、“生活支援ロボットの実用化”とありますが、ロボット自体の研究開発だけではなく、実用化に向けた“安全性検証手法の研究開発”も行われました。
大場さんは、「安全を検証するといっても、誰も何をしたらいいのかわかりませんでした。プロジェクトのメンバーたちは、そもそも安全とは何なのかから学ばなくてはなりませんでした」と当時を振り返って話します。
そのころ日本には、ロボットの安全という概念を正しく理解している人はほとんどいませんでした。そこで、プロジェクトの立ち上げに関わった山田教授が、数少ない安全の研究者として、メンバーたちに「安全とは何か」を教えることになりました。
大場さんは言います。「山田先生は初めに、『安全にするには、リスクを網羅的に検討しなければならない』と話しました。それを聞くと、“ロボットを安全にする”ことはできるのだろうかと絶望的な気分になりました」
それに対して山田教授は、ここを出発点に現実的な話を始めます。「安全かどうかは、コストや技術から考えて現実的な線引きが行われなければなりません。つまり、製造者も極力リスクを下げるように努力をしますが、利用者も、ベネフィットとのバランスでリスクを負うことになるのです」(図1)

図1 許容できるリスクとは? 工業製品のリスクとベネフィットの関係(資料提供:産業技術総合研究所)
しかし、それぞれのリスクが許容できるか否かを決めることが容易でない状態がしばしば生じます。というのも、安全はロボットの機能やそれを使用する人の年齢などによって変わるもので、一義的に決められるものではないからです。
プロジェクトでは、メーカーから提供されたロボットについて、許容できないリスクとは何で、それが起こらないために具体的にどのような試験を行い、検証しなくてはならないかが、常に問われました。こうしてメンバーたちの安全に対する感覚は育まれていきました。
それと同時に、ロボットの安全性を検証する試験を行う拠点が必要だと、リーダーの比留川さんと大場さんは、日本各地の試験場などを見て回りました。しかし、新しいロボット技術の安全性を検証できるような施設はありませんでした。
安全検証センターを新しく建設しなくてはならないと考え始めた時、茨城県つくば市にある一般財団法人日本自動車研究所(JARI)に隣接して建設する案が浮上しました。
JARIは長年にわたり自動車を総合的に研究している機関。その成果として自動車の安全性を検証するさまざまな技術や経験の蓄積があります。「生活支援ロボット実用化プロジェクト」にも、その知見を生かすためにプロジェクトに加わっていました。
JARIのロボットプロジェクト推進室の藤川達夫室長は、「私たちにとって自動車の安全技術は得意とするところです。一方、AISTはロボット研究に長年取り組んできました。両者が合わされば、ロボットの安全評価もできると考えました」と言います。
こうしてNEDOプロジェクトで、2010年12月、つくば市にあるJARI拠点の隣に、世界で初めての「生活支援ロボット安全検証センター」が開設されました。ロボットの安全規格を検証する試験場であるばかりでなく、メーカーがロボットに関するさまざまな安全知識を得ることのできる場としても機能することも、その設立目的には含まれていました。

図2 産総研による製品の安全性イメージに関する調査では、専門機関による認証が最も重要との声がロボット分野でも多かった(資料提供:産業技術総合研究所)
BREAKTHROUGH プロジェクトの突破口
世界初の生活支援ロボット安全検証センター
安全検証センターの開設は、生活支援ロボットの安全性検証が行えるようになったという点で、このプロジェクトにおける大きなブレークスルーでした。しかし、このような安全検証センターは前例がないため、3,600㎡のセンターをどのように利用すべきか、それを見きわめることからはじめなければなりませんでした。
藤川さんは、「まず、ロボットの安全を検証するために必要な試験を検討しました」と言います。「自動車であれば、その機能は“走る”、“止まる”、“曲がる”とシンプルに分類できますが、ロボットの機能は多種多様で複雑です。 例えば、電動車いすのように人間を乗せて走るロボットと、ロボットスーツのように人間が身につけて力を発揮するロボットでは、検討すべき安全の項目が異なります。ロボット特有の機能の安全性をどのように試験するか決めるのには、たいへん苦労しました」(藤川さん)
センターは、考えうるすべての生活支援ロボットの試験に対応することが理想ですが、まずはプロジェクトに参加するメーカーのロボットを、その主な機能によって、
①操作中心の移動作業型、②自律中心の移動作業型、③人間装着型、④搭乗型
に分類し、おのおのに必要な安全試験を検討して、それを実施できる設備とはどのようなものか考えました。その結果、18の試験装置を備えた四つのエリアからなる検証センターの姿が浮かび上がってきました。このエリア分けが適切だったことは、後に安全規格を作成する段階になって改めて認識されました。
苦労したとは言え、生活支援ロボットをその機能によって適切に分類できたのには理由がありました。大場さんはその訳を、「生活支援ロボットプロジェクトの開始当初から、参考にしてきた『一覧表』があったからです」と言います。
「この一覧表は、山田先生が提唱しているロボットの安全性検証のために研究開発すべき項目を元に作ったもので、私や藤川さん、その他のメンバーとともに、プロジェクトを進めながら、その都度、新しくわかってきた内容を追加していきました。一覧表の更新の際には、当時のNEDOの担当者も必ず来て、一緒になって考えてくれました」(大場さん)
一覧表に記載された、生活支援ロボットの安全性検証項目を見ると、ロボット特有の機能に関するものと、ほかの電子機械など従来製品と共通するものの二つに分けられることがわかります。
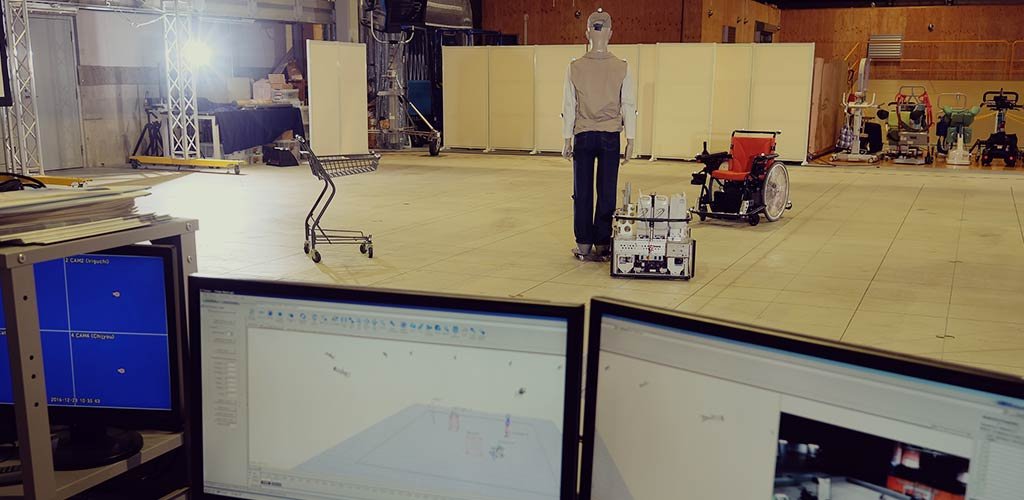
前者のロボット特有の機能を検証するためには、新しい技術や試験法の開発が必要で、今回のプロジェクトでは、例えばモーションキャプチャを使った試験法などが新しく開発されました。これにより、衝突事故を想定した試験で、ロボットの動きを追跡・解析できるようになりました(写真1)。
一方で、ロボットへの電波の影響については、従来の電子機械類への電波の影響を評価する方法を参考に、すでにある規格に添った試験法を積極的に取り込みました。また、車いすなどの福祉用具の試験も参考にしました。

写真1 モーションキャプチャーをはじめとした試験設備がそろう走行試験関連エリア。人とロボットの衝突を回避するための試験を行う
現在、センター内は走行試験関連エリア、対人試験関連エリア、強度試験関連エリア、EMC試験関連エリアの4区画に分けられ(図3)、それぞれ別のメーカーが利用しても情報が漏れないように、高度なセキュリティで守られています。

図3 センター内の4エリア
各エリアは検証内容に合わせて工夫されており、例えば、走行試験関連エリアには、モーションキャプチャーに加えて、ロボットが実際に使われる環境に合わせた走行試験ができるように、床の傾斜角度や材質を様々に変えることができる試験設備もあります(写真2)。

写真2 傾斜路走行試験装置。最大傾斜10度、ロボットの最高速度で急旋回をしても転倒しないかなどの試験を行う
対人試験関連エリアでは、ダミー人形を使って、人間とロボットが衝突した際の危害の大きさを検証、強度試験関連エリアでは、ロボットがどのくらいの衝撃や荷重、振動、さらに暑さ寒さといった環境に耐えられるかを試験します(写真3)。また、EMC試験関連エリアには、電波を遮断する電波暗室があり、ロボットに強力な電波を照射したときの動作の変化を観察します(写真4)。

写真3 強度試験関連エリア。走行強耐久性(左)や、過酷環境耐久性などを調べる

写真4 ECM試験関連エリアの電波暗室。さまざまな種類、強さの電波の飛び交う生活環境でもロボットが誤動作を起こさないか、また、ロボットが発する電波の影響について調べる
機能を削ぎ落とすことが安全につながる
では、実際にプロジェクトに参加したロボットたちは、どのようにして安全検証を行ったのでしょうか。
大場さんは、「ロボットの技術開発と安全性とは表裏一体ですから、センサーのようなものを後からペタっと張り付ければ安全になるというものではありません。ですから、ほぼ完成されたロボットをもってこられて、安全にして欲しいと言われても、なかなか難しいのです」と説明します。安全はロボット全体を見通しながら考えなければならず、開発当初から取り組む必要があるのです。
また、ロボットは多機能であればあるほど、安全担保が難しくなります。そこで、開発メーカーには、まず、自分たちがセンターに持ち込んだロボットについて、必要な機能と必要でない機能を明確にしてもらいました。必要ないと判断された機能を極力削ぎ落とす方向で、改良が進められました。
「自分たちのロボットに本当に必要な機能は何か、気づいてもらうことが重要です。ほとんど完成していると考えていたメーカーはさぞ驚いたことでしょう」(大場さん)
自らもロボット開発の経験をもつ大場さんは、ロボット研究者が色々な機能を載せたくなる気持ちをよく理解しています。それでも、「開発当初は機能の足し算をしてもいいですが、実用化を目指す段階に入ったら、安全のためにも機能は引き算しなくてはなりません」と言います。
こうしてコンセプトが絞られて初めて、ロボットはリスクアセスメントを受けることができます。ここで予想されたリスクに対して、どのような安全技術を搭載する必要があるかが決まります。そして搭載された安全技術が機能しているかを検証するために、安全検証センターでの試験が行われます。
衝突事故を例に取ると、メーカーが「このロボットは、軽くて柔らかくて速度が遅いので、ぶつかっても大きな事故になりません」と宣言していたら、ダミー人形を使って衝突試験を行い、被害程度の検証を実施します(写真5)。

写真5 対人試験エリアの衝突安全性試験装置
国際安全規格ISO13482の発行に貢献
「生活支援ロボット実用化プロジェクト」のミッションの一つは、生活支援ロボットの安全性検証手法の確立と、検証センター設立でした。そしてもう一つ、ここで集まった貴重な安全に関するデータを基に安全規格をつくることも、大切なミッションとなっていました。
山田教授はその理由を、「日本の生活支援ロボットが世界的に優位に立っている今こそ、日本発の国際標準を打ちたてる絶好の機会。現在の安全技術は、産業機械を対象とする安全のために開発されてきていて、欧州の社会システムの下に育まれてきました。ロボットのための安全技術体系は、ぜひ日本に新しく社会システムを作りながら、構築したいと考えたからです」と説明します。
通常、国際規格をつくる場合、まず、日本でJIS規格を整備して、それを国際安全規格ISOに提案していくことになります。しかし、それでは時間がかかり、5年間のプロジェクト期間内に国際規格を発行させるのは困難です。そこで、本プロジェクトでは、国内規格を飛び越えて、最初から国際安全規格へと提案することとしました。
また、規格内容をISOに提案し、個別委員会で議題に取り上げてもらうという手順を踏んでいては、そのロビー活動に数年も要するケースもあり、いきなり国際規格をめざしてもやはり時間を浪費しかねません。
そこで、メンバーは一考を巡らし、すでに欧州を中心に作成が提案されていた、パーソナルケアロボットの安全に関する「国際安全規格ISO13482」に、検証センターの成果を合流させることにしました。
日本側は、最初、前出の一覧表を元に規格の大枠を提案し、その後、プロジェクトの進行に合わせて徐々に具体的な提案を追加していきました。さらに、プロジェクトの成果をISO13482の試験法として提案しました。藤川さんは、その模様を次のように語ります。
「当初、“これで試験は十分なのか”と、ISO規格委員会から厳しい指摘を受けました。日本に持ち帰り、プロジェクト内で議論を繰り返しましたが、結果的にそれが試験内容のいっそうのブラッシュアップにもつながりました。また、プロジェクトは進行中で、安全検証センターもありましたから、指摘されたことを実際に試してみることもできました」(藤川さん)
「しばらくすると、私たちが提出するデータが優れていることがわかってもらえて、安全検証センターで実際に何をやっているか見たいと言われるまでになりました。とは言っても、安全性検証のノウハウは詳しく見せるわけにはいきませんが……」(藤川さん)
ついに日本の安全性検証の確かさが世界に認められたのです。藤川さんは、「安全の文化は、特にドイツで成熟しています。安全規格に関する会議に、安全後進国と思われていた日本から、急にたくさんの人が参加するようなって驚いていたことでしょう」と振り返ります。
生活支援ロボットの安全の文化が日本で育ち、世界へ発信できたのは、多くのメーカーがプロジェクトに参加し、各社の生活支援ロボットを用いて評価・試験を実施できたことにほかなりません。大場さんは、「生活支援ロボットの安全性検証をしようとして、日本ほど多様で優れたロボットを集められる国はほかにありません。その上、メーカーはどこも協力的で、その協力には深く感謝しています」と話します。
こうしてプロジェクトで得られたデータは、国際安全規格ISO13482として、これから世界中の生活支援ロボットの開発に活かされ続けます。また、ISO13482が日本主導で発行したことで、日本の生活支援ロボットが、国際市場でも、その競争力を発揮することが期待されます。
FOR THE FUTURE 開発のいま、そして未来
安全研究に終わりはない
生活支援ロボットの安全性検証手法の確立、安全検証センターの開設、ISO13482発行と、本プロジェクトは大きな成果を上げることができました。プロジェクトには研究機関、大学、メーカーなどを合わせて約30の組織が参加しており、その産学官の緊密な連携に対して、2015年に、第13回産学官連携功労者表彰の内閣総理大臣賞が授与されました。
ロボットを世の中に出したいメーカー、安全性検証の研究をしたい研究機関、実際に安全を検証するセンターなど、それぞれ異なる目的をもった人たちが互いに協力し合い、Win-Winの関係を築いたことは奇跡的だったと、プロジェクトのメンバーたちは口をそろえて言います。利害の異なる組織間での調整とプロジェクトの進捗を管理することがNEDOの役割でした。プロジェクトのメンバーたちはそのおかげで、それぞれの研究や開発に集中できたと話します。
大場さんはこのプロジェクトをきっかけに、講演会などに呼ばれて、安全について話す機会が増えたと言います。「講演を繰り返すうちに、やぶから棒にこれは安全ですかと尋ねてきたり、100%の安全があると考えていたりするような人は、しだいに減ってきているように感じています。日本にも、安全を正しく検証していく文化が根付き始めているようでうれしいかぎりです」(大場さん)
一方、安全への取り組みは終わることはありません。山田教授は、「安全性は、対象の機器や、使う人、コミュニティに依存するため、自分の研究人生だけで、答えが出るとは思っていません」と語り、突き当たった問題を一つずつ丁寧に解決していく姿勢で、研究を続けています。プロジェクトの元メンバーたちの多くも、安全検証手法に関する研究や技術開発を、現在も続けています。
藤川さんは、「プロジェクトの成果が本当に“活かされた”と言えるのは、ISO13482に添って安全性検証が行われた生活支援ロボットが世の中に出てきた時です。しかもそれは1台や2台ではダメなのです」と真価が問われるのはこれからだと言います。実際、検証センターでは、常時、複数の企業が試験設備を利用しています。
こうした安全検証に関わる人々に支えられ、生活支援ロボットが私たちの暮らしの中で自然に受け入れられていく日も、そう遠くない明日までに近づいてきています。
開発者の横顔
このロボットに何をやらせたいのかを問い続ける
空間にセンサーなどを配置して、空間全体をロボットと見なす研究を行ってきた大場さん。2009年からロボットの安全性検証を行う「生活支援ロボット実用化プロジェクト」を、リーダーの比留川博久さんとともに引っ張ってきました。今では、自身の専門を“マネジメント”だと言います。
ロボット研究者としての経験から、開発者が、“多くの機能を盛り込みたい”と考える気持ちを十分理解しています。しかし、ロボットの安全を確保し、実用化させるためには機能を絞らなくてはならないと、安全検証センターに持ち込まれたロボットに対して厳しく助言してきました。

産業技術総合研究所
ロボットイノベーション研究センター
副研究センター長
大場 光太郎さん
自動車の安全技術をロボットに生かしたい
「自動車の安全技術をロボットに応用できる」という考えから、プロジェクトに加わった日本自動車研究所のメンバーの1人。
自動車のタイヤの研究を10年。その後、自動車の環境への影響や安全の研究をやったことがきっかけで、プロジェクトに誘われました。
「自動車の予防安全を研究していました。今で言う自動ブレーキシステムなどの技術ですね。このような経験があったので、ロボットの安全をやるのに抵抗はありませんでしたし、自動車の安全技術がほかの分野で活かせるのは嬉しいことでした」
プロジェクトではマネジメント的な立場で、もし問題が起こったとしたら、どの程度の危害が発生するかを検証していました。自動車研究で培った“世の中へ出すんだ”という強い思いが、プロジェクトを成功に導きました。

日本自動車研究所
ロボットプロジェクト推進室 室長
藤川 達夫さん
ロボットとの共存を目指す
プロジェクトの立ち上げに関わり、その目的などを決めたほか、プロジェクトが始まってからは「安全とは何か」をメンバーらに教えるなどサポートしてきました。今回の成功から、プロジェクトの実現可能性を事前に調査・検討する大切さを学んだと話し、現在は、大学の研究・教育の中でそれを伝えています。
元々人間とロボットの共存を目指した研究を行っていた山田さんが、安全研究が盛んでない日本で、知識も経験も豊富な数少ない安全研究者になったのには理由がありました。
「人間とロボットが触れ合ってはいけないわけではありませんが、人間が怪我をするようでは共存できません。では、その境界は何だろうと考え続けていたら、それをロボット側に求めるのではなく、人間側に求めようという考えに至りました」
この考え方の転換によって“これ以上の力で当たったら痛い”という人間側の境界をロボットにインプットすることにしたのです。そのためには、人間がどれほどの痛みまで耐えられるのかを知らなくてはならないと実験し、結果を論文にまとめました。この考え方は、今、機械安全の分野で国際標準になっています。

名古屋大学大学院
工学研究科機械理工学専攻教授
山田 陽滋さん
各メンバーが得意とする分野を担当
ロボットに乗るロボットを使って研究
プロジェクトのメンバーから、「ロボットを貸して欲しい」とよく相談されるという松本さんは、移動型ロボットの中でも、人間が乗るタイプのものを研究しています。
技術開発も行いますが、今は、搭乗型移動支援ロボットの社会実装を目指して、つくばの街で搭乗型移動支援ロボットを使って通勤する公道実験などを行っています。
「ロボットによっては、人間が乗ったのでは、実験結果に誤差が出てしまうので、この問題解決のために開発したロボットです」

産業技術総合研究所
ロボットイノベーション研究センター 総括研究主幹
松本 治さん
“安全なロボット”というひとつの目標に向かって
機能安全という考え方が、まだ日本では馴染みのなかった頃から、機能安全をロボットに導入する研究をしてきました。
そんな中坊さんにとって、今回のプロジェクトの成功は感慨深く、「ロボットを売りたいメーカー、安全の研究がしたい私たち、安全検証センターを運営し安全に責任をもつ人たち。それぞれ利害の異なる人たちが集まって、よく成功したなと思います」と話します。
また、成功の理由を“安全なロボットを社会に出す”という一つの目標に皆が向かったからだと考えています。

産業技術総合研究所
ロボットイノベーション研究センター ディペンダブルシステム研究チーム長
中坊 嘉宏さん
12年も前から無人飛行ロボットを研究
「2005年の愛知万博をロボットのカンブリア紀のようだった」と振り返った岩田さんは、12年ほど前から無人飛行ロボットを研究しています。
「今でこそドローンがありますが、具体的なものがない時代に手探りで進んできました」
生活支援ロボットプロジェクトでも、いつか登場すると見越して、どのような安全性検証が必要かを検討しました。最近、無人飛行ロボットが次々に登場し、これまでの研究成果が生きる時代になりました。

産業技術総合研究所
知能システム研究部門フィールドロボティクス研究グループ
岩田 拡也さん
雨にも風にも負けないロボット
かつてコンピュータビジョンや画像処理を専門としていましたが、現在は、ロボットの安全センサーに携わっています。
「私が加わったのは、プロジェクトもだいぶ進んだ頃でした。当時、センサー性能を評価するためにどんな試験装置がいるかと聞かれましたが、ロボットの安全性検証に何が必要かは全くわかりませんでした」
今では、すでにある太陽光の影響を調べる装置に加えて,雨や雪などの影響も調べられる装置が必要と考えています。

産業技術総合研究所
ロボットイノベーション研究センター ディペンダブルシステム研究チーム
角 保志さん
なるほど基礎知識
ロボット分野における“安全”とは?
プロジェクトが始まった当初、メンバーのほとんどが「安全とは何か」を知らなかったと言います。安全という聞き慣れた言葉の本当の意味は何なのでしょうか。安全を深く理解するのは難しいことですが、ここでは簡単な概念を紹介します。
山田教授は、「実現するためのコストや技術を考えると、100%の安全は現実的ではありません。100%の安全がない以上、使う側もある程度はリスクを負うことを覚悟しなくてはなりません」と安全の前提について話します。
「安全」(使う人が許容できないリスクをなくす)ためには三つのステップがあります。
例えば、走行ロボットにあらかじめ出力の小さい駆動モーターを使うように設計して、衝突事故が起こる確率を非常に低くしたり、たとえ事故が起こったとしても人に危害が及ぶリスクを極めて小さくしたりします。このように設計や運用の改善によって、そもそものリスクを取り除くことを「本質的安全」と言います。
しかし、本質的安全ですべてのリスクを低減できるわけではありません。そこで、走行ロボット自身が周囲環境を感知して、運転速度を自動で下げたりする機能を載せる場合があります。これが「機能安全」です。
この二つのステップで、リスクは大きく低減されますが、さらに安心してユーザーに使ってもらうためには、「使用上の注意」などの情報提供を行います。これが三つ目のステップであり、安全方策として重要な要素の一つです。
また、安全は文化だと言われることがあります。それは安全を守るのに、三つのステップに加えて、社会的な仕組みや人々の思想か関わってくるからです。例えば、自動車の場合は事故をなくすことはできません。それでもできる限り事故を減らすために、運転は免許制にされ、道路交通法が制定され、車道と歩道が分けられ、信号機が設置されるといった社会システムがデザインされています。
エレベータやエスカレータ、遊園地の遊具などが販売後も、メーカーによって定期点検が行われているのも、安全の文化の一つと言えます。
NEDOの役割
「生活支援ロボット実用化プロジェクト」
(2009~2013年度)
(NEDO内担当部署:ロボット・機械システム部)
このプロジェクトでは、日本企業が生活支援ロボットを世界に先駆けて事業化し、日本発の生活支援ロボットの国内外市場での普及を図るために、ロボットの研究開発だけでなく、ロボットの安全性検証手法についての研究開発も実施しました。
具体的には、安全性の検証において、リスクアセスメント技術、リスク低減技術の検討や実際の使用環境を想定した試験を実施しました。また、プロジェクトの実施者を集め、安全性検証手法の開発状況や、開発した手法の紹介及びロボットの開発状況などの情報交換を実施する場を開催し、プロジェクトが効率的・効果的に進められる仕組みを構築しました。これらにより、安全性等のデータの取得・蓄積・分析を促進させ、安全性検証手法を開発しました。
そして、プロジェクトの成果を活用して、安全性試験項目、試験・評価方法や手順案を作成し、ISO/TC299(当時、ISO/TC199)に新規作業項目として提案。その結果、生活支援ロボットの安全に関する国際安全規格ISO13482の策定に大きく貢献しました。
関連プロジェクト
- 人間協調・共存型ロボットシステム研究開発(HRP)(1998~2002年度)
- 次世代ロボット実用化プロジェクト(2004~2005年度)
- 人間支援型ロボット実用化基盤技術開発(2005年度~2007年度)
- 戦略的先端ロボット要素技術開発プロジェクト(2006年度~2010年度)
- 生活支援ロボット実用化プロジェクト(2009年度~2013年度)
お読みいただきありがとうございました。
ぜひともアンケートにお答えいただき、
お読みいただいた感想をお聞かせください。
いただいた感想は、
今後の連載の参考とさせていただきます。