
CONTENTS
INTRODUCTION
本体重量30kgの軽量設計で災害場所への持ち運びも容易
閉鎖災害空間での運動能力を原発事故でも実証
BEGINNING
阪神淡路大震災での反省が出発点BREAKTHROUGH
クローラの素材と形状を改良して走行性・耐久性を向上
FOR THE FUTURE
福島第一原発事故現場である建屋内で活動FACE
役に立つロボットをつくりだす個性派人材集団
ロボット・AI・福祉機器
戦略的先端ロボット要素技術開発階段やがれきのある災害現場で高い走行性能を発揮するレスキューロボット
千葉工業大学
取材:February 2013



INTRODUCTION 概要
本体重量30kgの軽量設計で災害場所への持ち運びも容易
閉鎖災害空間での運動能力を原発事故でも実証
地震や津波、洪水、暴風など日本は自然災害の多い国です。また、最近では都市化も進み、地下や高層ビルなどでの都市災害、さらには有害物質を用いたテロなどの脅威も指摘されています。このような災害への脅威が高まる一方、わが国は世界有数の高度な技術を持ったロボット大国でもあります。そこで、倒壊した家屋や化学物質が充満した空間のように、人が立ち入ることが困難な場所での救出活動や情報収集を担うロボットの普及に、大きな期待が寄せられています。NEDOでは、ロボット産業をわが国における基幹産業の一つに成長させることを目的に、「ロボット・新機械イノベーションプログラム」の一環として「戦略的先端ロボット要素技術開発プロジェクト」を実施しました。本プロジェクトでは、産業ロボットや生活支援ロボットなどを含む幅広いロボット開発を推進する中、災害対応ロボットの研究開発プロジェクトも実施してきました。千葉工業大学、東北大学などにより、本プロジェクトで研究開発された災害対応ロボット「Quince」は閉鎖された被災空間でも遠隔活動が可能で、東日本大震災で事故が発生した福島第一原子力発電所建屋内での情報収集にも活用されました。
BIGINNING 開発への道
阪神淡路大震災での反省が出発点
災害現場では、倒壊した家屋により通路が確保できないだけでなく、二次災害の危険があり、人が入り込んで救助活動が行えないこともあります。また、化学物質を使ったテロなどの場合も、どんな薬品が使われているかを特定できないことが多く、人は踏み込めません。そのような場合を想定して、人に代わって災害現場の状況を調べる、救助活動を行うことなどを目的に、レスキュー(災害対応)ロボットが開発されています。
日本におけるレスキューロボット開発が本格的になったのは、1995年1月17日に発生した阪神淡路大震災がきっかけでした。阪神淡路大震災が起こるまで、わが国には災害対応ロボットの準備がなく、未曽有の大災害に際して、日本のロボットやロボット技術を役立てることができませんでした。その反省もあり、災害現場で使えるロボットを真剣に考えようという機運が高まったのです。

表1 主な地震災害及び風水害等(平成13~23年)消防庁「消防白書」「災害情報」ホームページより
文部科学省では、「地震動の予測」「耐震性の飛躍的向上」「被災者救助等の災害対応戦略の最適化」「地震防災対策への反映」という4つのテーマに沿って、2002年から「大都市大震災軽減化特別プロジェクト(通称:大大特)」を実施しました。このなかで災害対応ロボットの研究開発も行われ、情報収集ロボットの移動技術やインテリジェントセンサーなど数々の要素技術開発が進みました。
千葉工業大学未来ロボット技術研究センター(fuRo)の小柳栄次副所長(当時は桐蔭横浜大学所属)は、大大特に参加したロボット研究者のひとり。様々な災害対応ロボットがあるなかで、地上を移動して要救助者などの探索活動を行うグラウンド・ビークルタイプのロボットの研究を行ってきました。
「以前からロボカップレスキューというレスキューロボット大会に出場していたため、"不整地でも動けるロボット"の基礎となる考え方や技術はできていました。大大特プロジェクトでは、阪神淡路大震災での実際の救助活動を経験している神戸市消防局のハイパーレスキューチームからのアドバイスなど、実用化に向けた研究開発が大きく進みました」(小柳さん)
自然災害だけでなくテロ対策も重要課題のひとつ
その後千葉工業大学に移った小柳さんは、2006年から始まったNEDO「戦略的先端ロボット要素技術開発プロジェクト」に参加し、東北大学、筑波大学、岡山大学、産業技術総合研究所、情報通信研究機構(NICT)などと共に、「閉鎖空間内高速走行探査群ロボット」の研究開発に取り組みました。
「戦略的先端ロボット要素技術開発プロジェクト」は、自然災害だけでなく、1995年に発生した地下鉄サリン事件のようなNBCテロやガス漏れ事故もターゲットとしており、不特定多数の人が集まる場所で化学物質による災害が起こった場合の活動を想定しています。
ばらまかれた原因物質が特定されていないテロ発生初期は、二次災害を防ぐためにも、人ではなくロボットによる活動が重要になるのです。また、人や社会の混乱を目的とするテロでは、無線などのインフラが破壊されていることも考えられます。
救助活動の現場では、「逃げてくる要救助者を避けながら高速で移動できる」「1台ではできることが限られてしまうので複数台で連携しながら行動できる」「通信ができない閉鎖空間でも操作できる」など、それぞれに具体的な数値目標も設定された上で、災害時の課題解決に向けたより具体的な研究開発が行われました(図1)。
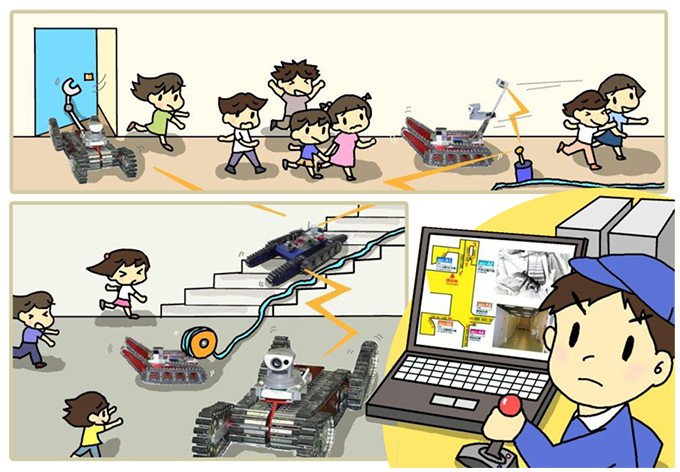
図1 災害現場で活動するレスキューロボットのイメージ。逃げてくる人たちを避けつつ、ドアを開け(化学物質封じ込めのため再び閉める)、情報収集等を行う
原型となる6本のクローラを持つ「Hibiscus」の誕生
小柳さんをはじめとする千葉工業大学fuRoの研究グループは、高速で不整地を走破できるロボット本体の開発を担当。大大特プロジェクトで作り上げたレスキューロボット「Hibiscus(ハイビスカス)」をベースに、災害現場で役立つロボット開発を目指しました(図2)。
全長97cm×全幅37cm、バッテリーを含んでも重量20kgとかなりコンパクトなボディの「Hibiscus」は、すでに障害物を乗り越えて走行できる走破性能を備えていました。一番の特徴は、アーム部分にキャタピラーを巻きつけたような"クローラ"を持つこと。それ以前にも、80年代の極限作業用ロボットを参考にクローラを持つロボットを作っており、4本の脚のようなサブクローラを個々に駆動させれば障害物も楽に乗り越えられると考えられていました。ところが、実際にビルの解体現場で走らせてみたところ、がれき上ではボディがつっかえ、サブクローラが空転するだけで、解体現場では使えませんでした。
そこで、ボディ本体にもクローラ(メインクローラ)を巻き、ボディだけが接することになっても移動できるように改良。2本のメインクローラと4本のサブクローラそれぞれが駆動するようにしたことで、不整地での走破性は格段に向上しました。
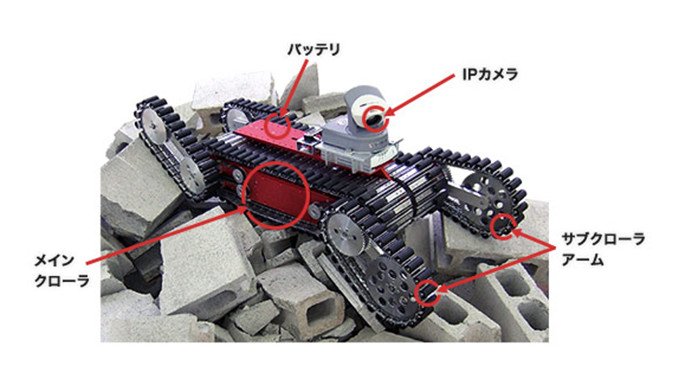
図2 Quinceのベースとなった「Hibiscus」。6本のクローラで駆動する仕組みなどはそのまま、NEDOプロジェクトではさらなる性能アップが実現した(画像提供・千葉工業大学fuRo)
ボディ本体にもクローラを巻いたことで、ボディの一部分が接しているだけでも進めるようにした(写真はQuince)
コンクリートや木材のがれきでも走破できる「Kenaf」
「Hibiscus」の移動技術を残しつつ、グレードアップしたのが、NEDOプロジェクトの最初の3年間で開発された「Kenaf(ケナフ)」です。
駅の自動改札も通れることを想定してギリギリまでサイズダウンに挑戦した「Hibiscus」は、重心が高く、サブクローラを立てた状態になるとコロンと横転してしまうという弱点がありました。「Kenaf(ケナフ)」では、構造を低重心化することでこの弱点を克服。全長60cm×全幅42cm、重量22kgと「Hibiscus」より大きくなりましたが、がれきでの走破性が大幅に改善しました。
低重心化によりがれきでの優れた走破性能を実現した「Kenaf」
「Kenaf」の特長は、サブクローラの先端部の直径をかなり大きくしたクローラの形状です。走行するだけならば先端部を大きくする必要はありませんが、クローラの先端部が細いと、がれきに挟まり抜け出そうとベルトを回転させるほど深みにはまって抜け出せなくなってしまいます。そこで、先端部の大きなクローラ形状にしたところ、それまで世界中の地上移動ロボットではなしえなかったコンクリートや木材がれきでの踏破を可能にしたのです。

先端部分を大きくした「Kenaf」のサブクローラ
また、階段を昇降するのはもちろん、階段途中での旋回も可能です。三次元環境計測表示により、歩行者などの移動障害物回避、静止障害物回避、がれき・階段乗り越えなどをスムーズに遠隔操縦できます。操縦については、足場の悪いがれきの上や狭い場所で、レスキュー隊員でも操作がしやすいように、三次元俯瞰図を見ながらジョイスティックで遠隔操作できるようになっています。
こうして完成した「Kenaf」が実際の災害現場で活用できるレベルにあるかどうかを検証するための実証実験も繰り返し行われました。アメリカ・テキサス州にある災害救助訓練施設Disaster Cityでのテストメソッドに複数回参加したほか、神戸市三宮地下街「さんちか」で行った実証試験では、秒速1.2mの高速移動、3Dマップの作成などのミッションをクリアし、約683mの長距離遠隔操縦を実現しました(図3)。また、ロボカップ世界大会にも出場し、2007年アトランタ大会の運動性能部門で優勝を果たしています。
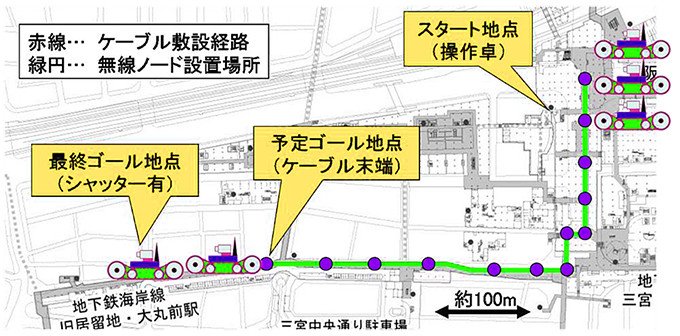
図3 神戸市三宮地下街での683m遠隔操縦試験
さらに実用性を追求して開発された「Quince」
改良を重ねながらNEDOプロジェクトで12台の「Kenaf」を製作した後、プロジェクト後半の2年間で開発されたのが「Quince(クインス)」です。「Kenaf」の実証試験での課題をクリアするとともに、実用化に向けた最終的なバージョンアップが進められました。
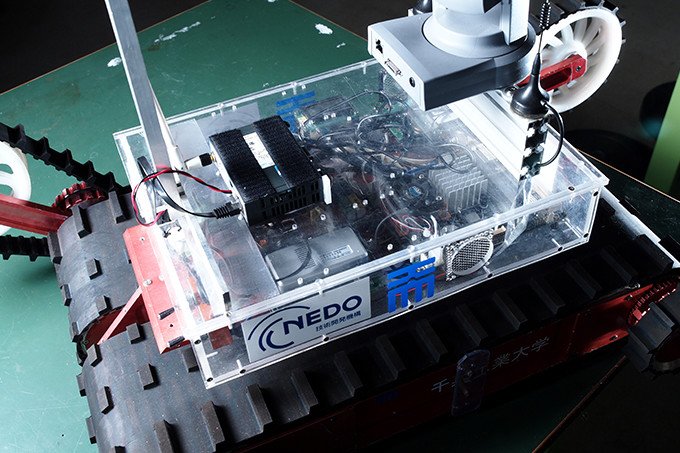
「Quince」開発にあたっては、「Kenaf」を実際に使ってみた消防隊員の意見や要望も改良ポイントとして組み込まれています。特に重視されたのは「頼りなさを解消してほしい」という要望でした。「Kenaf」では、制御回路基板などハードウエアを透明なプラスチックボックスで覆っていました。開発者にとっては中の様子が見えるという良さがありました。また、制御回路の熱を逃がしやすいというメリットもありました。
しかし、本体の上にハードウエアを積み上げたため重心が高くなるというデメリットにも繋がっていました。小柳さんは、「ロボット開発者にとっては中身が見えているほうが何かと都合が良かったのですが、コンピュータ(制御回路基板)が見えるため、『ぶつかったら壊れそう』『扱いにくい』との反応が多くありました。本体上に積んであるハードウエア全てを筐体に収納することは容易ではないことでしたが、実用化のためには小型化、内蔵化は欠かせないと、難題解決に取り組みました」と当時を振り返ります。
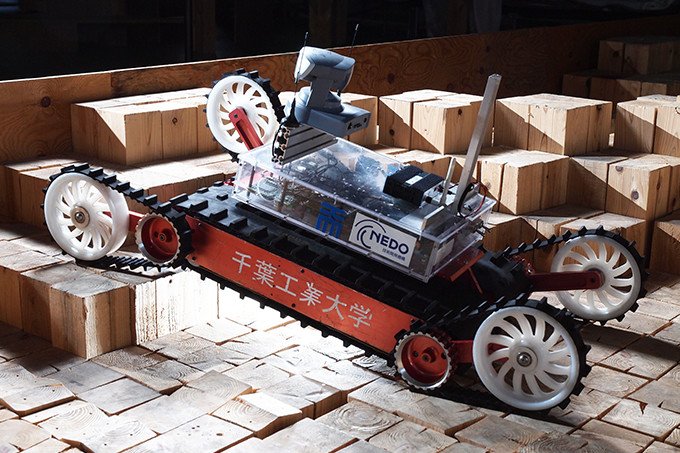
まずは、できるだけ制御基板を小型化しました。もっとも発熱量が大きいモーターをプーリーの中に組み込んだことで、発熱源を筐体から除去し、実装容積を確保することを可能にしました。その結果、何とかギリギリの大きさ(全長665~1099mm、全幅480mm、重量26.4kg)でおさめることができました。
また、CPUや通信ユニットデバイスからの発熱対策としては、ロボットが走行することで発生する空気の流れを利用した冷却フィン加工を筐体全面に施しました。これにより、防水・防塵機能も実装されることになります。
さらに耐衝撃性能を実証するため、数百回におよぶ転落実験を繰り返しました。1.2mの高さから、30度、40度、60度と角度を変えて落下させたところ、サブクローラが破損することもありましたが、サブクローラのアーム部分に衝撃を吸収するダンパーを装備。メインクローラの材質や形状も変更し、走行中に正面衝突するような衝撃でも吸収できる構造にしました。
「Kenaf」では制御回路基板が筐体上にあった。「中身が見える」「大きさの制約が少ない」「熱がこもりにくい」というメリットがあった

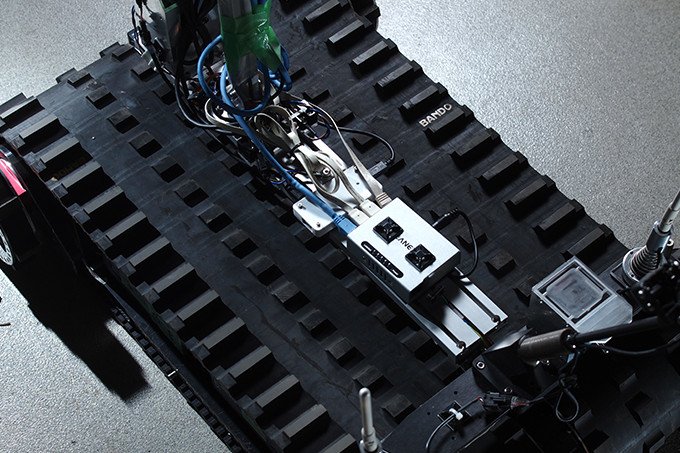
プーリーの中に組み込んだDCモーター。熱を逃し、スペースを広げることになった。
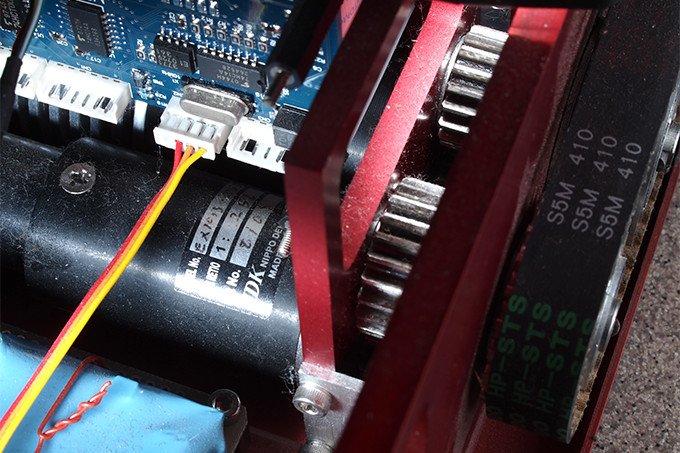
サブクローラ駆動モーター。サブクローラのモーター軸の外側をダンパーで覆っているので、強い衝撃を受けてもモーターへの影響が少ない
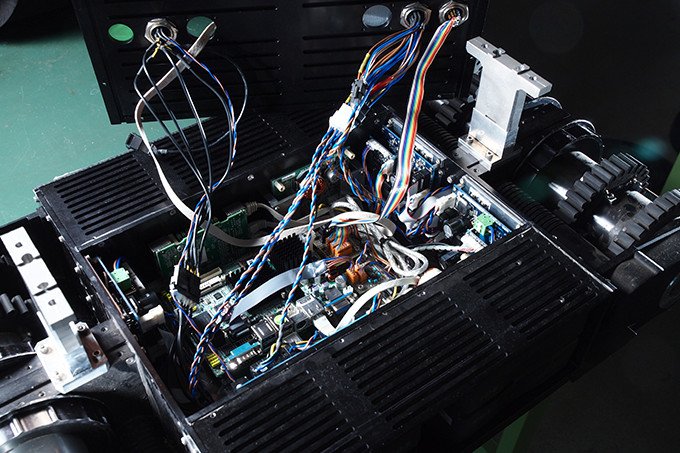
筐体に制御基板が収納された「Quince」。スペースの問題に加え、冷却、防塵、防爆の工夫も施された
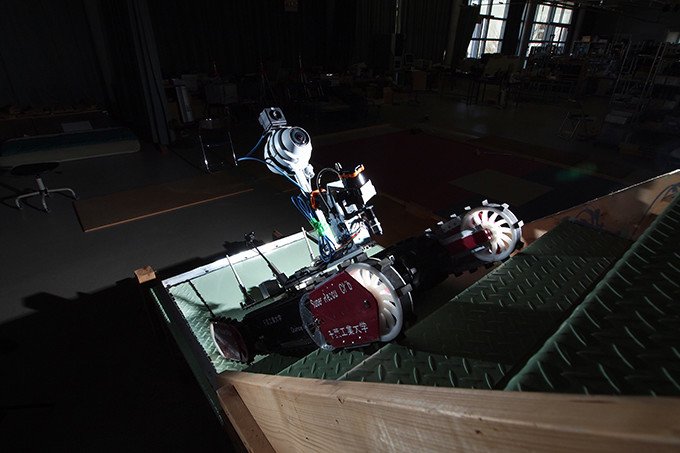
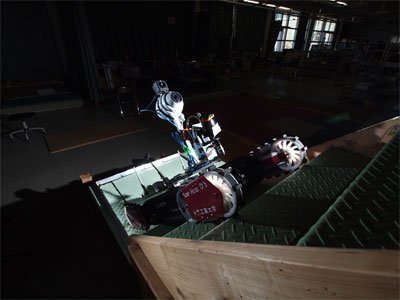
福島第一原子力発電所内を想定した階段を登る「Quince」
BREAKTHROUGH プロジェクトの突破口
クローラの素材と形状を改良して走行性・耐久性を向上
不整地走行の性能を左右するのは、クローラの素材と形状です。一般的なクローラは重いチェーン状のものを巻きつけていますが、常に床面に触れているメインクローラは摩擦による損失も多く、高速回転すると膨らんで外れやすいなどの問題がありました。そこで、「Kenaf」と「Quince」では、ゴム製のタイミングベルトを採用しています。
このベルトは当初、ベルトに小さなゴムの「歯」を接着剤でくっつけていましたが、この方法では走行中に外れてしまうことがよくありました。そこで、12mmもの厚みのあるゴム製のベルトを特別に製作し、そこから研削して「歯」を作る方法にしました。これにより軽さと柔軟性が向上し、地面を捉える食いつきも良くなりました。それぞれの「歯」も平面になるよう研削したので、摩擦低減と蛇行防止にもなっています。
また、旋回しようとするとトルクがかかりすぎてモーターが燃えてしまうという問題がありましたが、ボディ底部で地面と接するのは中心部分だけにして、前後が反っている台形のような形状にすることで解消。接しているのが中心だけなので、ピボットターンのように軽く旋回できるようになりました。
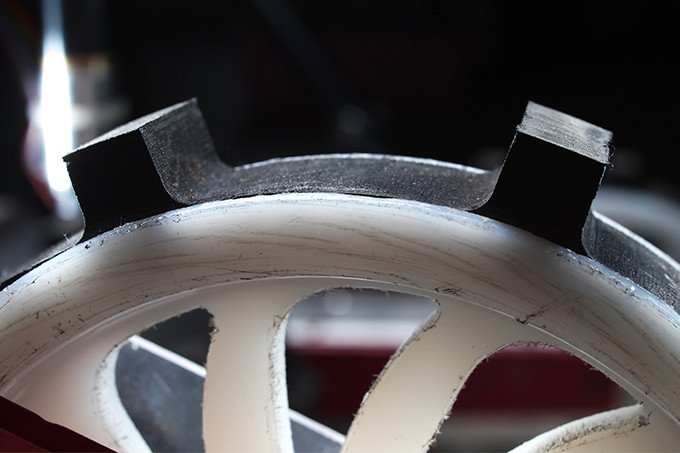
厚めに作ったゴムベルトを研削して作った「歯」。接地部分を平面にすることで摩擦低減と蛇行を防止
地面と接する部分は台形になっている(写真は「Rosemary」)
レスキュー隊員でも操作しやすいユーザーインターフェイス
災害現場ではロボットに詳しい研究者や技術者がロボット操作をするわけにはいきません。操作をするのは、技術的な知識や背景を持たないレスキュー隊員や消防隊員になります。どんなに高性能なロボットでも、彼らに使いやすいユーザーインターフェイスでなければその性能を発揮することはできないのです。
消防隊員が実際に使用してみた感想や要望は貴重な改良ポイントとなります。操作性について目立ったのは「行きはいいが、戻ってくるときの操作が難しい」という声。
遠隔操作の場合、モニターに映し出されたロボット搭載カメラ画像を見ながら操作を行います。前に進むときはこの方法で問題ないのですが、通信用のケーブルを巻き取りながら戻ってくる場合には、バックでなければ戻れず、簡単なはずのPCゲーム機コントローラでも操作できません。
そのため、バックをする際にはカメラが後ろを向いて進行方向の映像を映し、さらに実際は後退であっても目で見たまま「前進」のコントローラ操作で進めるようにしました。
また、2本の本体クローラと4本のサブクローラそれぞれが独立したモーターで動くのは強みでもある反面、非常に操作を難しくしてしまうので、クローラ同士が同期して動くようにもソフトウエアも改良しました。

市販のPCゲーム機のコントローラを使用しているため、ロボットの扱いに慣れていないレスキュー隊員からも扱いやすいと評価された(写真は「Quince」)
"燃えないモーター回路"のためのトライアンドエラー
NEDOプロジェクトの5年間、特にトライアンドエラーを繰り返したのがモーター関連部分でした。中でもモーターを回すための回路が、高負荷により発火することが度々起こりました。「わずかに火花が出るだけでも、ガスが充満した災害現場では使えません。そもそもレスキューロボットが火を出しているようでは話になりませんから」とは、プログラムを担当した上席研究員の吉田智章さん。
吉田さんは、発火しない仕組みとして一つ一つ回路の問題を解消しつつ、回路が高温になったら停止するようプログラムすることで保護しました。ただし、これでは災害現場で動かしたいときに動けないことになるので、停止後自動的にリセットする機能を付加するなどして対応しました。また、モーター自身も火花の出ないブラシレスモーターを使用しています。
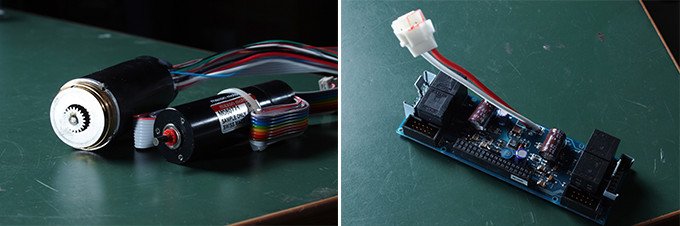
ブラシレスモーター(左)と回転制御基板(右)。発火しにくいものの、ソフトも回路も特殊なため簡単には回せないという難しさがあった(写真はともに開発途上に使用されたもの)
もう一つ、発火の恐れがあったのがバッテリーです。「Kenaf」では軽いリチウムイオンポリマー電池を使っていましたが、機械的に弱く、どこかに負担がかかると自己発火するという危険性がありました。そこで「Quince」では保護回路が組み込まれた民生品のリチウムイオンバッテリーに変更。そのままで飛行機に乗せて運べるようにもなりました。

左がリチウムイオンポリマーバッテリー(「Kenaf」で使用)と、リチウムイオンバッテリー(右・「Quince」で使用)
FOR THE FUTURE 開発のいま、そして未来
福島第一原発事故現場である建屋内で活動
「Quince」が実際の災害現場で活動したのは、NEDOプロジェクトが終了後、2011年3月11日に発生した東日本大震災でした。震災当時、小柳さんをはじめとした千葉工大のプロジェクトメンバーは「Quince」を携え、テストのためアメリカ・テキサス州に滞在していましたが、震災の知らせを受け急遽帰国。同じプロジェクトの仲間である東北大学のメンバーと合流し、耐放射線や無線対応などの準備を始めました。4月には東京電力も「Quince」を使って、福島第一原発の原子炉建屋内で放射線量測定などを行う準備を始めたと発表しています。
2011年6月に1台目の「Quince」が原子炉建屋内に入った際は、汚染水の採取をするために地下へと降りていくはずでしたが、事前に得ていた図面より階段幅が狭く、踊り場で旋回ができなかったためミッション達成には至りませんでした。
2回目となる7月は、線量測定、写真撮影、ダストサンプルの採取に成功。この際、「Quince」が3号機の冷却系バルブのダメージ具合を撮影した画像が決め手となり、注水可能との判断が下されています。その後、2台目、3台目の「Quince」も福島第一原発に行き、それぞれにミッションを達成しています(図4、5)。
事故後の原子炉内で活動を行った「Quince」は、海外の原発からも問い合わせがあるなど、国内外で話題となりました。
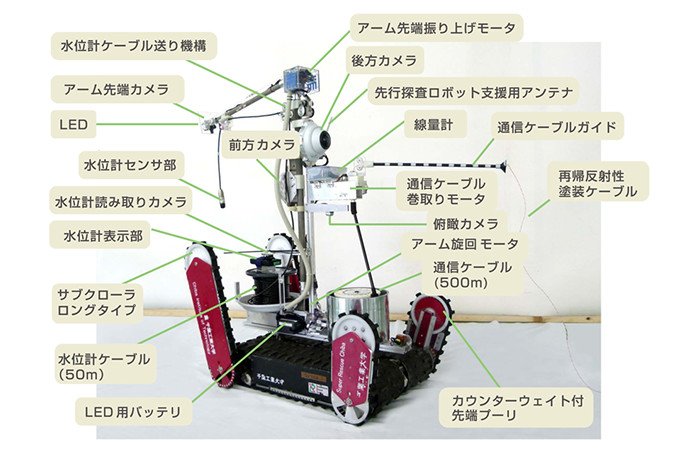
図4 福島第一原子力発電所事故対応用に改造された「Quince」(画像提供・千葉工業大学fuRo)
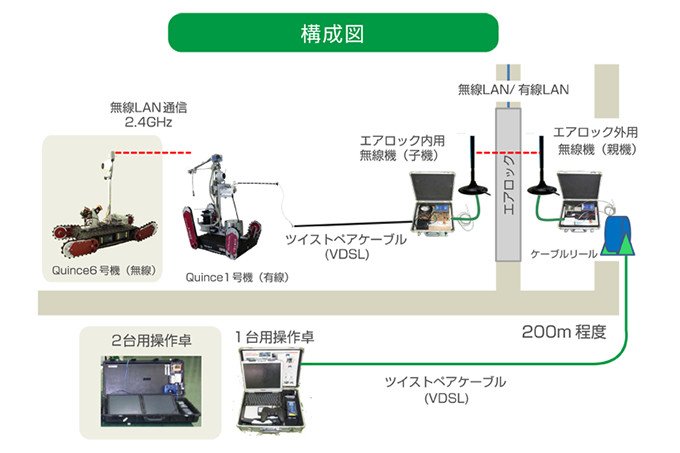
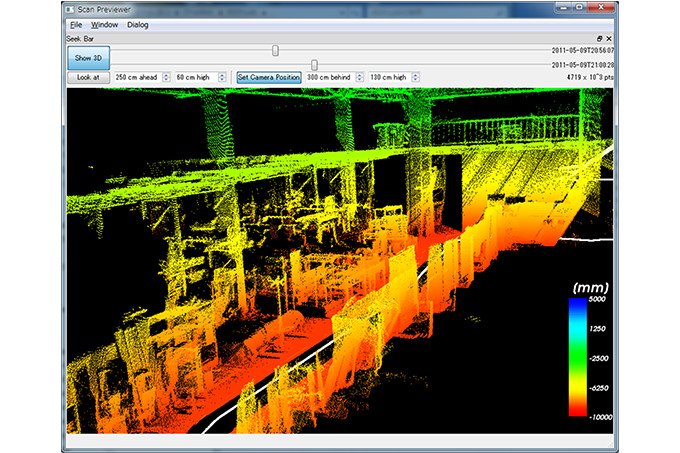
図5 福島第一原発での「Quince」の作業構成図(上)、「Quince」がレーザスキャナで記録した千葉工業大学校舎内の画像(画像提供・千葉工業大学fuRo)
「海外のある国では原発事故を最小限に抑えるために原子力発電所の備えの一つとして装備したいとのことでした。そうすれば事故があってもすぐ情報収集をして対応ができます。そのために日本で作られたこの小さなロボットに注目が集まっているのです」(小柳さん)
レスキューロボットの形状や性能については、アメリカのNIST(National Institute of Standards and Technology:国立標準技術研究所)の基準が国際標準とされており、「Quince」でも参考にしています。特に重要なのは、大きさです。大きすぎれば移動や救助がしにくくなり、小さすぎても階段昇降ができません。
NISTでは1辺20インチ(約50cm)の正三角形を通れる大きさが適正なサイズだとしており、閉鎖された災害現場ではこのサイズの穴を開けて救助活動を行います。ボンベなどの装備を背負ったレスキュー隊員が通ることができ、要救護者を乗せたソリ状のストレッチャーを引き出すこともできます。
このような国際基準に照らし合わせても、千葉工大のレスキューロボットの技術レベルは高いといえます。本プロジェクトのメンバーでもある東北大学大学院情報科学研究科の田所論教授は国際レスキューシステム研究機構の会長を務め、ロボット研究者と企業のマッチングを支援する活動を行っています。
田所教授は「レスキューロボットが現場で使われるようになるには、レスキューロボットが消防車のような"商品"になることが必要。また、そのための組織づくり、国による後押しも不可欠」と語っています。
福島原発での詳しい成果は、千葉工業大学未来ロボット技術センターfuRoWebサイトへ
NEDO「ステージゲート方式」「実用化」が開発の推進力に
本プロジェクトはいくつかの研究チームが同じテーマで研究に取り組み、3年経過した時点でステージゲート審査を受け、審査によって選ばれたチームだけがその後2年間の研究開発を行う「ステージゲート方式」で行われました。
千葉工大、東北大、岡山大、NICT、産総研、UMRSという大規模チームのほかに2チームがあり、計3チームで最初の3年間は開発を行いました。千葉工大では最初の2年間で「Kenaf」を開発。ステージゲート後に「Quince」開発に着手しています。
また、"事業化"ではなく"実用化"を目標としていた点も、本プロジェクト特有のものといえます。企業ではない、研究機関主体の本プロジェクトが事業化を目指すものだったら、このような成果は生まれなかったはずだと小柳さんは言います。
「ステージゲート方式では、たとえ旧知のロボット研究者であっても、他チームであるため何気ない会話もできないという苦しさがありました。競争によって技術力を高める効果はある一方で、お互いに不足するものを補い合うなど、コラボレーションすることで得られるものも大きいので、その点は今後の課題ではないでしょうか」(小柳さん)
多様な災害現場での活用に向けて
NEDOプロジェクトで開発した「Kenaf」「Quince」を受け、原子力発電所内での探査を行うことに特化した「Rosemary(ローズマリー)」と「Sakura(サクラ)」が開発されました。しかし、レスキューロボットが必要とされるのは原子力発電所に限らず、様々な災害現場で活躍できるロボットが求められます。
とは言うものの、どんな現場でも使えるレスキューロボットなどなく、それぞれの現場に応じて作っていくものだと、今回の福島原発対応を経験して小柳さんは実感したそうです。小柳さんは言います。「Quinceはプラットフォームになりえますが、万能ロボットは作れません。例えば火山の噴火現場といっても、浅間山と普賢岳では求められる機能も注意すべきポイントも違います。地の利のある人と相談しながら、現地に応じて作っていく。そして、優れたロボットと訓練された人、さらに機能的な組織があって初めて災害現場で活躍できるのです。そのためには法整備も必要になりますが、今回のQuinceの活躍がきっかけとなり、災害救助ロボットへの理解が深まることを期待しています」(2013年2月取材)

「Quince」の原発対応の知見を活かして開発された「Rosemary」(左)と「Sakura」(右)
開発者の横顔
役に立つロボットをつくりだす個性派人材集団
人の役に立つロボットをつくれる、マインドを持った人材を育成
千葉工業大学の未来ロボット技術研究センター(fuRo)で副所長を務める小柳栄次さんは、工業高校教員を務めながら34歳で大学院に進学し、51歳で博士号を取得。その後、大学教員に転職したというユニークな経歴の持ち主です。とはいえ、高校教員時代にロボットコンテスト高校生全国大会などで優勝を重ね、ロボット研究者の間ではすでに有名人でした。大学教員になってからレスキューロボットの研究を始めました。
「人の役に立つロボットをつくりたいというのがそもそもの出発点です。しかし、だからといって性能の押し売りをではなく、人の気持ちに立って、本当に人が困った局面で手を貸してあげることが"人の役に立つ"ということだと考えています。そうなると、実は、一番大事なのはロボットを"つくる人"のマインドこそ重要と気づいたので、最近ではロボットそのものよりロボットをつくる人材を育てることに興味があります。今回のプロジェクトにしても一番の成果物はロボットではなく、優秀な若い人材だったと思っています」

千葉工業大学
小柳さん
役立つユースケースがあればこそロボット研究者は頑張れる
吉田智章さんは、自律型移動ロボットやソフトウエア開発が専門で、本プロジェクトでは移動プラットフォームに関わる全てを担当。裏方的存在ではありますが、吉田さん無しにはロボットは動かせません。
「今回のプロジェクトでは、様々な機能が組み込まれることや多くの人が扱うことを考えて、拡張性を残して作り込むことが重要でした。燃える回路を改良してもまた別の問題が起こるなど、一つ一つ問題を潰していく作業はプロジェクト終了後の福島原発対応直前まで続きましたが、『なんとしても原発の中を見なければ』というモチベーションがあったから頑張れた。役に立つユースケースを積み重ねることで研究者のモチベーションが高まり、優れたロボット開発ができるのだと分かりました」

千葉工業大学
吉田さん
ロボット界の巨匠に囲まれ、ネジ1本にまで魂を込めました
千葉工業大学大学院博士課程1年生の西村健志さんは、高校時代にロボコンにハマり、マイコンカーラリーで全国ベスト8に入ったこともあります。大学院では機械系を研究中。今回のプロジェクトでは機械・回路設計から組み込み技術全般において中心になって開発を勧めました。
「小柳先生、田所先生というロボット界の巨匠と一緒にレスキューロボット開発に携われることになり、そのなかで少しでも役立ちたいという思いから、とにかくたくさんの時間をこのプロジェクトに注ぎ込みました。ロボットが部品から形になるところまでの一通りを担当させてもらったので、『Quince』についてはネジ1本まで魂がこもっています。それだけ思い入れもありますし、努力した甲斐もあったと思います」

千葉工業大学
西村さん
なるほど基礎知識
レスキューロボットに求められる基本性能
レスキューロボットの活動は、地震、津波、台風、地すべり、火山噴火などの自然災害、NBC兵器(核物質や生物・化学兵器)によるテロ、化学プラント事故、ガス漏れ事故まで、人が立ち入って探索・救助活動を行うことが困難な場所での災害が想定されています。ロボットの種類としては、「Quince」のように陸上を走行するタイプのほか、がれき内に潜り込んで探査を行う蛇型ロボット、上空から要救助者を探すインテリジェントエアロロボット、さらにそれらのロボットの通信網を構築するための通信ケーブルロボットなどがあり、それぞれ実用化に向けた研究開発が進められています。
実際の災害現場では、これらのロボットを単体で使用するのではなく、複数台の連携によって活動にあたります。今回のプロジェクトでも「複数の遠隔操縦型ロボットが、階段やドアのある建物内でオリエンテーリングを行い、決められたエリアを人間よりも速く、迅速に移動する」という目標が設定されていて、移動ロボット「Quince」のほか、ドア開けロボット「UMRS」、ケーブル敷設ロボットなどの連携体勢でミッションをクリアしました。
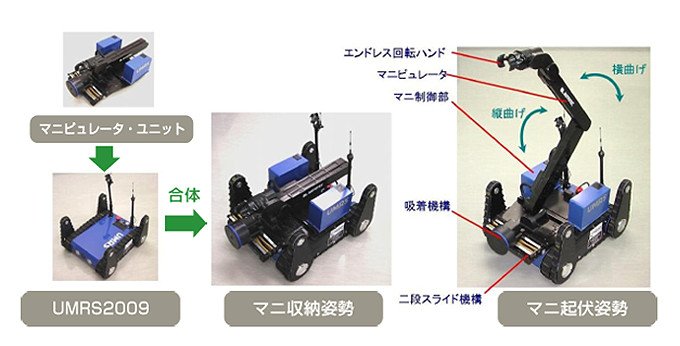
図6 ドア開けロボット「UMRS」
NEDOの役割
「戦略的先端ロボット要素技術開発」
このプロジェクトがはじまったのは?
わが国の製造業を支えてきたロボット技術や機械技術を基盤として、IT・知能化技術など先端的要素技術との融合を促進することで、家庭、医療・福祉、災害対応など幅広い分野で活躍する次世代ロボットの開発・実用化を促進し、生産性の向上と人間生活の質の向上を実現するために必要なロボットシステム及び要素技術の研究開発が、現在、関係府省の連携の下で実施されています。なかでも災害対応分野は、アジアでの大規模災害(1990年代の自然災害死者59万人のうち70%の41万人がアジアに集中)の頻発もあり、RT(ロボットテクノロジー)大国である日本の貢献が国際社会から求められています。この分野で国際的なリーダーシップを取ることができれば、他の手段では得難い大きな国益がわが国にもたらされると予測できます。そこでNEDOでは、自然災害や人為災害の中でも、きわめて危険性が高く、RTのニーズが高い被災した建物内(地下鉄、地下街、高層ビルなど)での、迅速な情報収集を行うロボットシステムの研究開発を行うこととしました。
プロジェクトのねらいは?
複数の遠隔操縦型ロボットが、階段やドアのある被災した建物内でオリエンテーリングを行い、決められたエリアを人間よりも速く、迅速に移動できるようにすることが、本プロジェクトの大きな目標でした。想定される災害場面としては、地下鉄駅、地下街、空港、高層ビル(オフィス、大規模店舗、劇場)などがあげられます。具体的な開発ミッション(課題)の内容は、そうした場所で、ロボット(人が運べる程度の小型軽量であることが必須条件)が複数台で連携し、障害物が散在するなか、避難する人間の邪魔にならず、ドア(施錠していない丸型またはレバー型ノブ付きドア)を開けて通り抜け、既存インフラ(通信等)が使用できなくとも必要な環境はロボット自らが構築しながら、決められた地点とそこに至るまでの映像情報等を迅速に取得することでした。本プロジェクトでは数回にわたる実証実験を実施し、その有効性を確認しています。
NEDOの役割は?
本プロジェクトは、上記目標を達成するために、研究実施主体が競争的に研究開発を行うことでイノベーションを加速させる、「ステージゲート制度」を導入して実施されました。企業、大学・研究機関等によって構成される研究開発グループを公募し、原則としてミッション毎に複数の研究開発グループを選定して実施しました。NEDOでは、経済産業省、研究開発責任者と密接な関係を維持しながら、プロジェクトの目的及び目標に照らして適切な運営管理を行いました。委員会及び技術検討会等、外部有識者の意見を運営管理に反映させる他、四半期に1回程度プロジェクトリーダー等を通じてプロジェクトの進捗について報告を受けました。プロジェクト実施期間を前半3年間の「ステージI」(2006~2008年度)と、後半2年間の「ステージII」(2009~2010年度)に分け、「ステージI」の最終段階に評価を実施して、原則、ミッション毎に1グループへの絞り込みを行いました。複数ロボットの高速走破の実現のために必要な技術は災害対応のみならず、建設ロボット、プラント保全ロボット、セキュリティロボット、農林業ロボット、屋外自律走行車両など、あらゆるRTシステムの重要な基盤技術ともなり、その波及効果はきわめて大きいとNEDOでは考えて支援を行ってきました。
関連プロジェクト
お読みいただきありがとうございました。
ぜひともアンケートにお答えいただき、
お読みいただいた感想をお聞かせください。
いただいた感想は、
今後の連載の参考とさせていただきます。