Successful interconnection test of a drone traffic management system with the participation of general drone operators
―29 operators conducted flight tests―
October 30, 2019
New Energy and Industrial Technology Development Organization (NEDO)
NEC Corporation
NTT Data Corporation
Hitachi, Ltd.
Zenrin Co., Ltd.
Japan Meteorological Association
Japan Aerospace Exploration Agency (JAXA)
Fukushima prefecture
Minamisoma City
Fukushima Innovation Coast Framework Promotion Organization
NEDO is driving a major R&D project to develop traffic management systems for drones. As part of this project, NEDO, NEC, NTT DATA, HITACHI, ZENRIN, Japan Meteorological Association, and JAXA cooperated with Fukushima Prefecture, Minamisoma City, and the Fukushima Innovation Coast Framework Promotion Organization conducted an interconnection test with a drone traffic management system for safer flights by multiple operators in shared airspace, and completed 100 flights per square kilometer per hour. In total, 29 drone operators participated in the test at the Fukushima Robot Test Field (located in Namie, Minamisoma City, Fukushima Prefecture)
Each participant tested interconnection with a drone traffic management system that handled information sharing among multiple drone operators relying on an Integrated Traffic Management function server installed in the operations control center of the Fukushima Robot Test Field, as well as the APIs and API connection support services of the drone traffic management system. In addition to seventeen NEDO Project members, twelve general drone operators participated in this trial. The participation of ordinary drone operators in this test proved the usefulness of the drone traffic management system and the effectiveness of security measures for interconnection.

1. Overview
The National Institute of New Energy and Industrial Technology Development (NEDO) is advancing a major project※1 to develop a drone traffic management system for safe flight of drones by multiple operators in the same airspace and to conduct demonstration tests※2 of a traffic management system at the "Fukushima Robot Test Field※3" (located in Namie-cho, Minamisoma-shi, Fukushima Prefecture). In the future, NEDO aims to enable all operators to operate drones safely and with peace of mind, with an eye toward making proposals to international standards.
In the traffic management system, drone operators can share information on the flight plan of the drone, real-time flight conditions, airspace safety, such as prohibited airspace, with other drone operators by connecting the Traffic Management Function they operate to the Integrated Traffic Management function and Information Provision Function.
Recently, a server was installed in the operations control center of the Fukushima Robot Test Field to provide integrated traffic management functions to enable multiple drone operators to share information. The server went live on August 30, 2019. In addition, rules were developed for the use of APIs※4 for the drone traffic management system. This enabled ordinary drone operators not participating in the NEDO Project to access the server through APIs, and established an interconnection test environment with the drone traffic management system.※5
NEDO, NEC, NTT DATA, Hitachi, Zenrin, Japan Meteorological Association, and JAXA conducted interconnection tests of the drone traffic management system in the Fukushima Robot Test Field in cooperation with Fukushima Prefecture, Minamisoma City, and the Fukushima Innovation Coast Framework Promotion Organization.
In this connection test, seventeen NEDO Project participants and twelve ordinary operators not affiliated with the NEDO Project participated. Looking to the future of wider deployment of drones in the 2020s, testing included airspace densities of 100 flights per square kilometer per hour.
This interconnection test was based on two agreements: Cooperation Agreement※6 on Demonstration of Robot Drones concluded by NEDO and Fukushima Prefecture on November 22, 2017, and the Cooperation Agreement※7 on Human Resources Development for Robots using the Fukushima Robot Test Field concluded by NEDO and Minamisoma City on April 10, 2019.
-
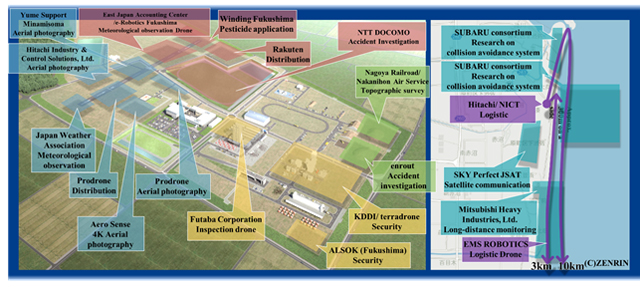 Figure 2. Flight Area Map (Left: Fukushima RTF, Right: Coast Area)
Figure 2. Flight Area Map (Left: Fukushima RTF, Right: Coast Area) -
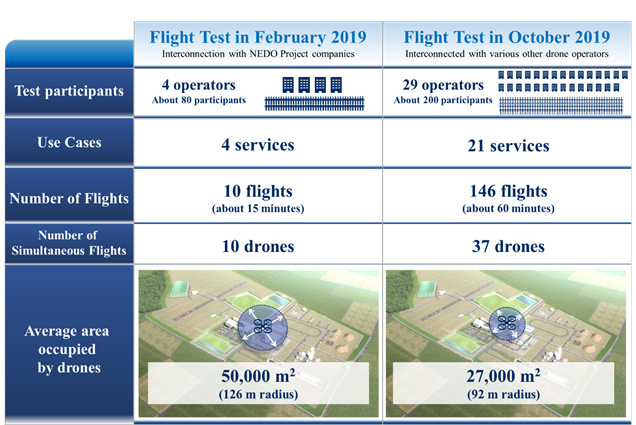 Figure 3. Comparison with February 2019 tests
Figure 3. Comparison with February 2019 tests
2. Development and evaluation of integrated traffic management and information provision functions aimed at broader implementation
Within the traffic management system, the Traffic Management Function enables safe drone operations even when multiple operators fly in the same airspace by using information sharing provided by an Integrated Traffic Management Function. In addition, operators can obtain the information necessary to operate drones using map information and weather information provided by the Information Provision Function.
In the October interconnection test, the Integrated Traffic Management Function and the Information Provision Function were connected via a network so that general drone operators not involved in the NEDO Project could participate. To improve the security of the network, firewalls and intrusion detection systems (IDS) were installed, authentication keys were distributed to the providers connecting, permitting only approved operators to connect. In addition, managing flight plans and flight conditions assuming multiple simultaneous drone use cases such as multiple drone weather observation, and multi-drone formation flights for delivery.
The NEDO Project also verified and evaluated the use of airspace and flight rules for the safe operation of these drones through traffic management simulations.
3. Interconnection test with the participation of ordinary drone operators
In this interconnection test, drone operators who were not part of the NEDO Project participated. These ordinary drone operators were as follows. (10 flight test implementation teams, 12 operators, 23 drones)
| Company Name | Objective | No. of Drones | Features |
|---|---|---|---|
| Winding Fukushima | Pesticide application | 1 | Long flight time |
| e-Robotics Fukushima East Japan Calculation Center |
Meteorological observation | 12 | Simultaneous control of multiple aircraft |
| Nagoya Railroad Nakanihon Air Service |
Topographic survey | 1 | High precision surveying with laser scanner |
| Aero Sense | Aerial photography | 1 | Persistent aerial surveillance with wired power supply |
| Yume Support Minamisoma | Aerial photography | 3 | Providing local services |
| Hitachi Industry & Control Solutions, Ltd. | Aerial photography | 1 | Vision-based navigation |
| Mitsubishi Heavy Industries | sentry | 1 | UTM-Ready helicopter with LTE |
| ALSOK Fukushima | Security | 2 | Persistent security surveillance with wired power supply |
| Futaba Electronics | Inspection | 1 | Communications towers/plant inspection |
| ANA Holdings | - | - | Demonstrated API connection |
(random order)
The NEDO Project supported these ordinary operators to connect to the APIs. The outcomes of flight plan applications and approvals/denials were provided as a Web service, making it possible to submit the area and time of a flight through an Internet browser. In addition, the NEDO Project provided flight control devices onboard the drones to report the position and speed of drones to the traffic management system during flight.
In the future, the NEDO Project plans to improve the user interface so that many more ordinary operators can easily participate in interconnection tests.
4. Major Research Results on Individual Technologies of NEDO Project Members
In this interconnection test, the following NEDO Project members participated. (11 flight test implementation teams, 17 operators, 23 drones)
| Company Name | Use | No. of Drones | Features |
|---|---|---|---|
| NTT DOCOMO | Disaster investigation | 4 | Interconnect support by traffic management function using LTE |
| Rakuten | Delivery | 2 | Inter-site delivery |
| Japan Weather Association | Meteorological observation | 1 | Measurement of high altitude wind speed, etc. |
| KDDI/terradrone | Security | 4 | Security video transmission by LTE |
| Hitachi National Institute of Information and Communications Technology |
Delivery | 5 | Long distance operation by wireless relay |
| SUBARU Nippon Radio Nippon Avionics Mitsubishi Electric Autonomous Control Systems Laboratory (ACSL) |
Delivery | 2 | Validateconnectivity between system equipped with collision-avoidance technologies developed on a different NEDO Project and the operation control system |
| SKY Perfect JSAT | Disaster response | 1 | Drone-mounted satellite communication function |
| PRODRONE | Logistics | 1 | UTM-Ready large UAS for heavy freight |
| Aerial photography | 1 | UTM-Ready system for small UAS(under 200g) | |
| Simulator | - | UTM-Ready simulator | |
| enroute | Disaster investigation | 1 | 3D terrain model creation |
| EMS ROBOTICS | Delivery | 1 | Vibration measurement for liquid transport |
| JAXA | Simulation | - | Safety evaluation by simulation |
(random order)
The results of this interconnect test on individual technologies were as follows.
- Sky Perfect JSAT Co., Ltd. conducted flight tests assuming BVLOS flight in disaster damaged areas or areas where ground communication environments are not operational, and verified that they can receive position and flight condition data of satellite drones and control via communication satellites from the direct flight control function in real time.
- NTT DOCOMO, Inc. provided in-flight traffic management functions using mobile communication network (LTE) over the air, and assisted seven of the 21 flight test teams with the connection of the integrated traffic management function. The traffic management device onboard drones is only about 60 grams, making it easy to install even on small drones.
- Hitachi, Ltd. and Japan Information and Communications Research Institute developed a location sharing device with multi-hop communications※8 that enables long-distance BVLOS flight of multiple drones. By cooperating with the integrated traffic management function and the information provision function, Hitachi, Ltd. demonstrated safe and reliable delivery using multiple drones that assumes the use of a kind of drone highway.
- SUBARU, Nippon Radio Co., Ltd., Nippon Avionics Co., Ltd., Mitsubishi Electric Corporation, and Autonomous Control Systems Laboratories demonstrated that systems equipped with collision-avoidance technologies currently under development under a separate effort with NEDO can interconnect with the drone traffic management system. As a result, the aim was to integrate the UAS traffic management system with collision avoidance technology.
- JAXA developed a UTM simulator that simulates the operation of multiple drones and evaluated the drone traffic management system. In this test, JAXA connected a part of the simulator to the drone traffic management system and verified deconfliction of drone traffic to avoid mid-air collisions.
-
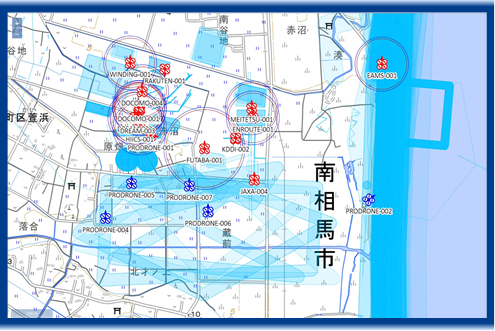 Figure 4. Drone Traffic Situational Awareness Display
Figure 4. Drone Traffic Situational Awareness Display
5. Future Plans
NEDO, NEC Corporation, NTT DATA Corporation, Hitachi, Ltd., ZENRIN CO., and Japan Meteorological Association will operate a traffic management system and verify the functions of the traffic management system by February 2020.
Annotations
- ※1 Project
- Project name: Project to Realize an Energy-saving Society where Robots and Drones are Active Implementation period: Five years from FY2017 to FY2021 are planned.
FY2019 Budget: 3.6 billion yen - ※2 Demonstration test of flight traffic management system
- Demonstration of traffic management system for multiple drone operators in the same airspace (news release dated March 1, 2019)
- ※3 Fukushima Robot Test Field
- This is an R&D center that can reproduce the actual operating environment and conduct research and development, demonstration tests, performance evaluation, and pilot training for land, sea, and air field robots, such as unmanned aerial vehicles, disaster response robots, and underwater exploration robots, which are expected to be utilized for logistics, infrastructure inspection, and large-scale disasters. The center opened in Minamisoma City and Namie Town in Fukushima Prefecture in FY2018.
- ※4 API (Application Programming Interface)
- A mechanism for sharing functions of programs and software. By publishing the API on the Internet, it is possible to provide services to domestic and overseas businesses.
- ※5 Building an interconnection testing environment
- Established an environment for interconnection testing with the drone traffic management system of multiple operators in the same airspace.
- ※6 Cooperative agreement on demonstration of robotics and drones
- The agreement was concluded on November 22, 2017 to strengthen the cooperation between NEDO and Fukushima Prefecture, accelerate the commercialization of robotic drones by actively utilizing the Fukushima Robot Test Field in the Project for Energy-Saving Society in which Robots and Drones are Active, promote the Fukushima Innovation Coast Initiative, and invigorate the robot and drone industry. The official name of the Agreement is "the Agreement between the New Energy and Industrial Technology Development Organization of the National Research and Development Corporation and Fukushima Prefecture on Demonstration, etc. of Robots and Drones Using the Fukushima Robotic Test Field."
NEDO and Fukushima Prefecture signed a cooperative agreement on demonstration of robots and drones (news release November 22, 2017) - ※7 Cooperation Agreement on Development of Robotic-Related Human Resources Utilizing
the Fukushima Robot Test Field - The agreement concluded on April 10, 2019, with the aim of promoting robotic-related human resource development and revitalizing robot-related industries, through collaboration between NEDO and Minamisoma City, and through the use of various opportunities such as the Fukushima Robot Test Field for robot-related human resource development courses and World Robot Summit 2020 to develop environments in which outstanding human resources from both domestic and overseas can be gathered. The official name of the Agreement is "the Agreement between the New Energy and Industrial Technology Development Organization of the National Research and Development Corporation and Minamisoma City on the Development of Robotic-related Human Resources Utilizing the Fukushima Robot Test Field."
NEDO and Minamisoma City signed a cooperative agreement on human resource development related to robots (news release dated April 10, 2019) - ※8 Multihop communications
- A technology that uses a wireless device with a data relay function to communicate between endpoints that cannot communicate directly. In this demonstration, long-distance communication is realized by relaying a signal from a distant drone radio through a radio installed in a relay drone.
6. Contact Information
(Inquiries regarding this news release)
NEDO Robotics/AI Department: Miyamoto, Yamana TEL: +81 (0)44-520-5244
(General NEDO Inquiries)
NEDO Public Relations Department: E-mail: nedo_press@ml.nedo.go.jp