戦略的イノベーション創造プログラム(SIP)/インフラ維持管理・更新・マネジメント技術
事業・プロジェクト概要
本事業は、内閣府が推進するSIP(戦略的イノベーション創造プログラム)の11課題の一つである「インフラ維持管理・更新・マネジメント技術」を、同課題の管理法人としてNEDOが実施するものです。
本事業では、インフラの維持管理に関わるニーズと技術開発のシーズとのマッチングを重視し、新しい技術を現場で使える形で展開し、予防保全による維持管理水準の向上を低コストで実現させることを目指します。これにより、国内重要インフラを高い維持管理水準に維持するだけでなく、魅力ある継続的な維持管理市場を創造するとともに、海外展開の礎を築きます。NEDOが担当する具体的な研究開発項目は以下のとおりです。
- 研究開発項目(1)点検・モニタリング・診断技術の研究開発
- (B)点検・診断技術の実用化に向けた研究開発
打音点検技術や遠隔診断技術等の高精度化や高信頼度化を目的に、確実に実用化が期待できる非破壊・微破壊に基づく点検・診断技術の研究開発を行う。 - (C)モニタリングシステムの現場実証(海洋・沿岸構造物、空港施設)
インフラ構造物のモニタリングに必要となる、各種センサ技術、データ伝送技術、解析技術等の各々の技術を組み合わせたモニタリングシステムについて現場実証(計測・分析)を行う。
- (B)点検・診断技術の実用化に向けた研究開発
- 研究開発項目(2)構造材料・劣化機構・補修・補強技術の研究開発
- (D)構造物の補修・補強・更新に関する個別材料技術の研究開発
橋梁等の構造物を対象とし、作業簡便化や工期短縮化による低コスト化と長寿命化を目指した新たな補修・補強・更新材料に関する個別技術を開発する。
- (D)構造物の補修・補強・更新に関する個別材料技術の研究開発
- 研究開発項目(3)情報・通信技術の研究開発
- (B)インフラの多種多様なセンシングデータを処理・蓄積・解析する技術の開発
維持管理のためのプラットフォームとして、多種多様なデータを一元的に管理する大規模データベースに関する技術開発を実施する。
- (B)インフラの多種多様なセンシングデータを処理・蓄積・解析する技術の開発
- 研究開発項目(4)ロボット技術の研究開発
- (B)維持管理ロボット・災害対応ロボットの開発
- 〔1〕維持管理ロボット
- a)橋梁やトンネルの維持管理・点検要領に従い、打音検査を代替できる装置を有するロボット
- b)橋梁の維持管理・点検要領に従い、橋脚・橋台または支承部の近接目視を代替できる装置を有するロボット
- 〔2〕災害対応ロボット
土砂崩落や火山災害時の、人の立入りができない災害現場において、以下のロボットの開発を行う- c)掘削、押土、盛土、土砂運搬、排水作業等の応急復旧作業が可能なロボット
- d)遠隔または自動による機械等の制御に係る情報の伝達機能を有するロボット
- 〔1〕維持管理ロボット
- (B)維持管理ロボット・災害対応ロボットの開発
-
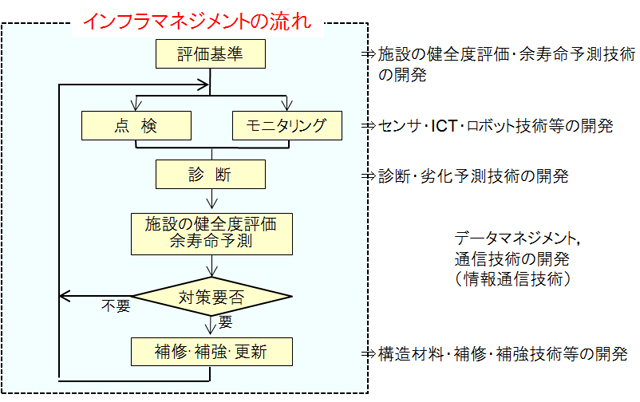 インフラ維持管理フローと基盤技術開発
インフラ維持管理フローと基盤技術開発
基本情報
| 事業期間・予算額 | 事業年度:2014年度~2018年度、2018年度予算:7.7億円
PD:藤野 陽三(横浜国立大学先端科学高等研究院上席特別教授) |
|---|---|
| 技術・事業分野 | ロボット |
| プロジェクトコード | P14031 |
| 担当部署 |
ロボット・AI部
(TEL:044-520-5241)
IoT推進部 (TEL:044-520-5211) |
詳細資料
最終更新日:2019年5月20日