世界初、100:1の減速比でも逆駆動可能なギヤを開発
―ロボットの関節やEVの変速機などへの展開に期待―
2019年1月30日
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)
国立大学法人横浜国立大学
NEDOと横浜国立大学は、減速機の構成要素を最適化することで動力伝達効率を飛躍的に高め、従来不可能であった100:1を超えるような高い減速比の減速機でも、逆駆動が可能となるギヤ(バイラテラル・ドライブ・ギヤ)を開発しました。
これは、ロボットの関節が外力に対して柔軟に動くことを可能とするだけでなく、エネルギー回生の効率化を図るとともに、モーター情報による負荷トルク推定を可能とし、小型軽量化・低コスト化・省エネ化を同時に実現できるため、今後、協働ロボット、アシストロボット、移動ロボットなどの関節部材や、電気自動車(EV)の変速機などへの展開が期待できます。
なお、横浜国立大学は、今回開発したバイラテラル・ドライブ・ギヤについて、2月6日から8日までパシフィコ横浜で開催される「テクニカルショウ ヨコハマ2019」に出展します。
1.概要
高齢化社会では、ロボットが産業界だけでなく社会全体で人の役割の一部を担う、人とロボットが共存する社会の実現が期待されています。このような共存社会では、人とロボットの意図しない接触により危険が生じるおそれがあります。ロボットの関節に使用されている減速機が外力に対して柔軟に動く逆駆動性がないため、接触の衝撃を吸収できず、結果として人の安全を十分に確保することができませんでした。さらにロボットの中核部品である減速機は、古くから数多く研究されてきているため、大きな改善の余地はないと考えられていました。
国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)は、2015年度に「次世代人工知能・ロボット中核技術開発プロジェクト」を立ち上げ、現在の人工知能(AI)・ロボット技術の延長線上にとどまらない、人間の能力を超えることを狙った革新的な要素技術開発を進めており、その中で国立大学法人 横浜国立大学は、「高効率・高減速ギヤを備えた高出力アクチュエータ※1の研究開発」に取り組んでいます。
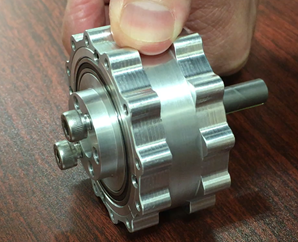
今般、本プロジェクト※2で横浜国立大学は、減速機の一つである複合遊星歯車機構※3の動力伝達効率の最大化を図るために歯車の歯数や転移係数などの構成要素を最適化することで、動力伝達効率を飛躍的に高めることに成功しました。これにより、従来不可能であった100:1を超えるような高い減速比の減速機でも、柔軟な逆駆動が可能となるギヤ(バイラテラル・ドライブ・ギヤ)を開発しました。また、試作したバイラテラル・ドライブ・ギヤは従来の減速機と比べて、逆駆動動力伝達効率の約30%向上と、増速起動トルク(逆駆動トルク)の約1/300に低減を実現しました。
本機構は逆駆動に特徴があり、これは、ロボットの関節が外力に対して柔軟に動くことを可能とするだけでなく、逆駆動による制動時の熱を電気エネルギーとして回収すること(エネルギー回生)を効率化するとともに、モーター情報による負荷トルクの推定を可能とし、小型軽量化・低コスト化・省エネ化を同時に実現できるため、今後、協働ロボット、アシストロボット、移動ロボットなどの関節部材や、電気自動車(EV)、電動自転車の変速機などへの展開が期待できます。
なお、横浜国立大学は、バイラテラル・ドライブ・ギヤについて、2月6日から8日までパシフィコ横浜で開催される「テクニカルショウ ヨコハマ2019」(小間番号i-14/15)に出展します。
2.今回の成果
(1)減速機における力の伝達と逆駆動性
減速機における順駆動動力伝達効率と逆駆動動力伝達効率との関係(図2)では、順駆動動力伝達効率が50%以下になると逆駆動ができなくなります。また、順駆動動力伝達効率が100%に近づくほど、逆駆動動力伝達効率との差が双曲線的になくなるため、出力側で受けた力が入力側に伝わる能力である逆駆動動力伝達効率が高くなります。
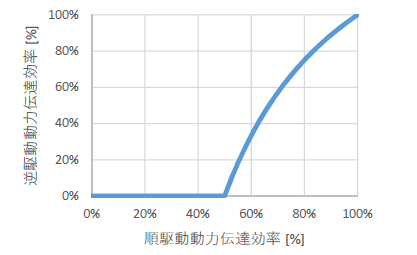
図2 順駆動動力伝達効率と逆駆動動力伝達効率との関係
また従来の減速機は、減速比が高くなると、順駆動動力伝達効率は双曲線的に低下し、逆駆動動力伝達効率は線型的に低下する性質があり、100:1の減速比では、逆駆動ができなくなります(図3)。
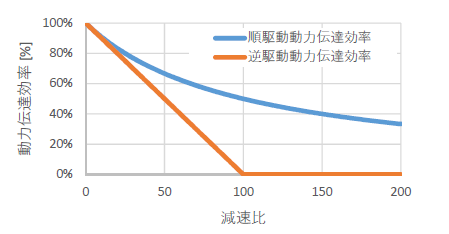
図3 減速比と動力伝達効率の関係(従来減速機)
(2)バイラテラル・ドライブ・ギヤ
今回開発したバイラテラル・ドライブ・ギヤの基本構造は複合遊星減速機構と呼ばれるものと同じであり、太陽とその周りを回る(公転する)惑星のように、中心の歯車である太陽歯車と、公転する歯車の遊星歯車、さらに遊星歯車にかみ合って回転する内歯車から構成される遊星歯車機構を同軸上に2段に重ねたものです(図4)。複合遊星歯車機構の長所である高い減速比のもとで大きなトルクを伝達できることで小型化・軽量化を実現するとともに、各歯車形状を、最も多く使われているインボリュート曲線※4とすることにより低コストを可能としました。さらに減速比を任意に指定しながらも、各歯車の歯数と転移係数を変数として動力伝達効率を最大化する自動計算ソフトを開発し、複合遊星歯車機構の短所である設計の難しさを解決しました。
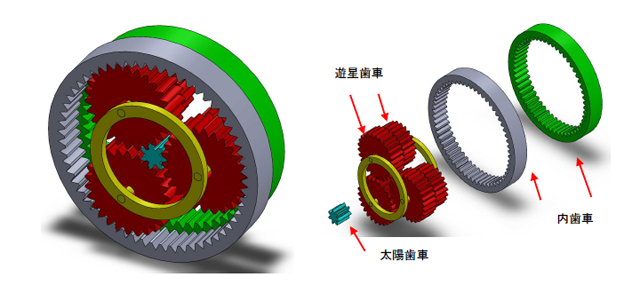
図4 バイラテラル・ドライブ・ギヤの構造
(3)バイラテラル・ドライブ・ギヤの仕様
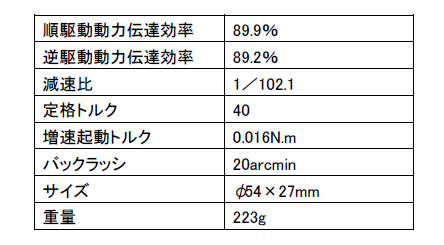
今回試作したバイラテラル・ドライブ・ギヤでは、減速比が102.1:1でありながら、順駆動動力伝達効率が89.9%という非常に高い値を示しました(表)。これに伴い、従来の減速機であれば逆駆動できなかった減速比でありながら、逆駆動動力伝達効率も89.2%という成果を得ました。
表 試作バイラテラル・ドライブ・ギヤの仕様
3.今後の予定
NEDOと横浜国立大学は、バイラテラル・ドライブ・ギヤのより高い動力伝達効率と、従来では不可能であった減速比1000:1の実現、高速回転型モーターとモータードライバーおよびこれらを一体化したアクチュエータの研究を継続し、多くの企業への技術移転をとおしてロボットへの展開とともに新規用途の開拓を推進します。
また、本プロジェクトに参加している日本電産シンポ株式会社は、今回開発したバイラテラル・ドライブ・ギヤの実用化を目指します。
【注釈】
- ※1 アクチュエータ
- 入力されたエネルギーを回転運動や直進運動などの物理的な運動に変換する装置です。
- ※2 本プロジェクト
-
事業名:次世代人工知能・ロボット中核技術開発/革新的ロボット要素技術分野/高効率・高減速ギヤを備えた高出力アクチュエータの研究開発
実施期間:2015年度~2019年度 - ※3 遊星歯車機構
- 公転する歯車を遊星歯車、中心の歯車を太陽歯車と呼びます。この装置を利用すると、同じ変速条件では小型軽量化が図られ、入力軸と出力軸を一直線にできる特長を持ちます。したがって、各種機械の増速および減速装置、その他に広く用いられます。(出典 ブリタニカ国際大百科事典 小項目事典よりNEDO作成)
- ※4 インボリュート曲線
- 曲線に巻き付けた糸を引っ張りながら解きもどすとき、その糸状の定点の描く曲線のことです。普通、円に巻き付けたものをいいます。インボリュート。伸開線。(出典 大辞林 第三版よりNEDO作成)
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:前原、渡邊 TEL:044-520-5242
横浜国立大学 研究・学術情報部 産学・地域連携課 E-mail:sangaku.sangaku@ynu.ac.jp
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:坂本、藤本、佐藤 TEL:044-520-5151 E-mail:nedo_press@ml.nedo.go.jp
関連ページ
- ロボット・AI
- 同分野のニュースリリースを探す
- 同分野の公募を探す
- 同分野のイベントを探す