人工筋肉の寿命を最大100倍にすることに成功
―身体装着型アシスト装具などへの応用を目指す―
2019年12月11日
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)
学校法人中央大学
NEDOは、「次世代人工知能・ロボット中核技術開発」に取り組んでおり、今般、NEDOと中央大学は、軸方向繊維強化型人工筋肉に用いるゴムの伸張結晶化特性を利用し亀裂の広がりを防ぐことで、人工筋肉の最大100倍の長寿命化に成功しました。
軸方向繊維強化型人工筋肉は、一般的な人工筋肉と比較して収縮特性に優れますが、動作原理上ゴムの大変形を利用しているため寿命が短いという欠点があり、実用化に向けた課題となっていました。
今後、本成果を可変粘弾性下肢アシスト装具Airsistシリーズの新型などに適用することを目指します。
なお、中央大学は、軸方向繊維強化型人工筋肉と、これを応用した可変粘弾性下肢アシスト装具Airsistを12月18日から21日まで東京ビッグサイトで開催される「2019国際ロボット展」に出展します。
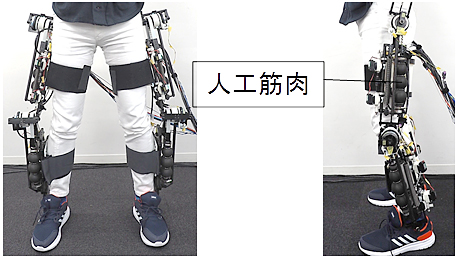
可変粘弾性下肢アシスト装具Airsist
1.概要
高齢化社会では人口に対する労働力の不足が問題となっており、現在、業務の自動化、機械化による効率改善が盛んに行われていますが、農業、製造業、介護などの分野では、作業効率やスペース不足などの理由から自動化、機械化が困難な作業が存在します。そのため、身体装着型アシスト装置など、作業負担の軽減を目的とした機器の実用化が期待されています。
身体装着型アシスト装置で用いられる駆動装置(アクチュエーター)の一つに、空気圧ゴム人工筋肉の一種である軸方向繊維強化型人工筋肉があります。本人工筋肉は、ゴムチューブの中に軸方向にそろえた補強繊維を挿入した構造となっています。これに空気圧を加えることで、半径方向には膨張、軸方向には収縮し、アクチュエーターとして利用することができます(図2)。また、本人工筋肉は軽量、柔軟であり、低圧駆動で最大38%以上収縮するなど、一般的なMcKibben型人工筋肉※1と比較して優れた収縮特性を持ちます。しかし、本人工筋肉はゴムが大きく変形するため、ゴムの劣化による亀裂が生じやすく、寿命が短いという欠点があり、実用化に向けた課題となっていました。
今回、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)と学校法人中央大学理工学部中村研究室は、軸方向繊維強化型人工筋肉に用いるゴムの伸張結晶化特性を利用することで亀裂の広がりを防ぎ、人工筋肉の最大100倍の長寿命化に成功しました。今後、本成果を可変粘弾性下肢アシスト装具などに適用することを目指します。
なお、中央大学は、今回開発した軸方向繊維強化型人工筋肉およびそれを応用した可変粘弾性下肢アシスト装具Airsist※2を12月18日から21日まで東京ビッグサイトで開催される「2019国際ロボット展」に出展します。
-
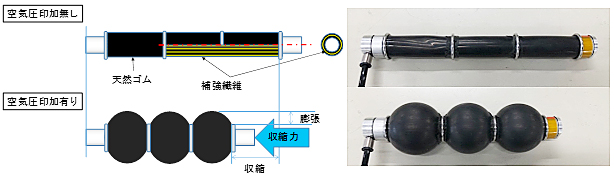 図2 軸方向繊維強化型人工筋肉
図2 軸方向繊維強化型人工筋肉
2.今回の成果
図3にゴムの伸張結晶化特性による長寿命化モデルを示します。外部応力によりゴムにひずみが発生すると、ある応力に達したところでゴムの分子鎖の最も結合の弱い部分が切断されます。これにより切断された隣の分子鎖に大きな負荷がかかり、次の分子鎖が切断されます。これを繰り返すことで亀裂が広がり、最終的な破断に至ります。しかし、ゴムの伸張結晶化特性を利用することで、伸張により形成された結晶層が亀裂の広がりを防ぎゴム材料の長寿命化を図ることができます。
-
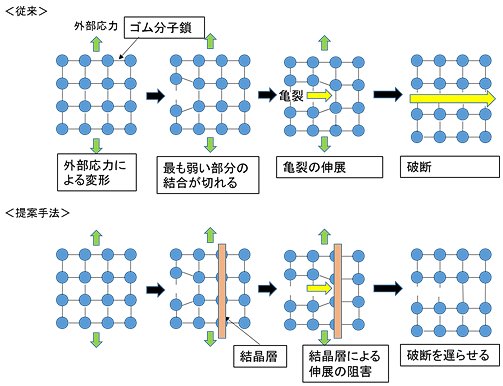 図3 結晶層による亀裂成長阻害のモデル
図3 結晶層による亀裂成長阻害のモデル
図4に広角X線回折※3による結晶層の測定結果(上)と、天然ゴムの応力ひずみ曲線(下)を示します。応力ひずみ曲線の横軸はひずみ、縦軸は応力です。測定は元の長さの7倍まで伸張させた後に元の長さまで収縮させています(青三角形は伸張および収縮の方向を示します)。広角X線回折の測定から、伸張過程では元の長さの4倍まで伸張させた時点から、結晶層が形成されていることを示す明点が観察されはじめ、収縮過程では元の長さの3倍まで収縮させた時点まで、明点が観察されました。以上から、伸張結晶化特性は可逆的な反応であり、結晶層を維持するには赤線の領域で使用する必要があることがわかりました。
-
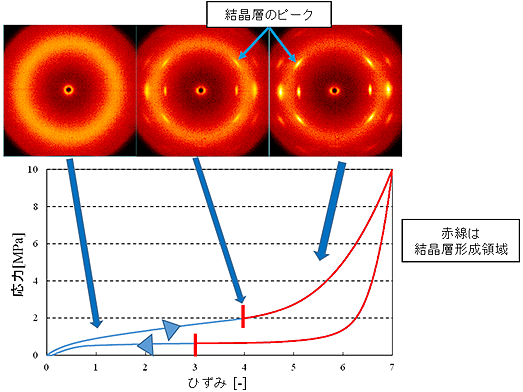 図4 広角X線による結晶層の測定
図4 広角X線による結晶層の測定
この知見に基づき、ゴムの結晶層が維持されるように、ゴムが一定程度以上伸張した状態を常に保つように人工筋肉を制御しました。これまでは、伸縮の回数が数百から数千回に達した段階で破断してしまいましたが、今回開発した人工筋肉の制御手法を適用したところ、80万回を超える伸縮が可能となり、本研究テーマの目標値である20万回(装着者が1分間に2回程度アシストされることを仮定し、1日5時間稼動で1年程度使用可能)を達成しました(図5)。
-
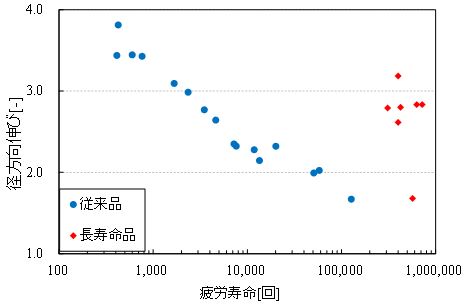 図5 軸方向繊維強化型人工筋肉の疲労寿命
図5 軸方向繊維強化型人工筋肉の疲労寿命
本人工筋肉を身体装着型アシスト機器に適用することによって以下の4つの利点を得ることができます。
- 軽量で高出力であるため、駆動部のモビリティーが高く小型化が可能となります。 また、McKibben型人工筋肉と比較して低圧で同程度の出力が得られるため、コンプレッサーなどの空気圧源の小型化が可能となります。
- 構造的に柔軟性があり、剛性の制御がオープンループ(センサーによるフィードバックを使わない制御であり、センサーレスのシンプル構造と制御則が特徴)で可能です。また、減速器付きのモーターと比較して、バックドライバビリティ(アクチュエーターの出力側で受けた力が入力側に伝わる性質)の面で優れており、本質的に安全性が高いです。
- 人工筋肉の形状の自由度が高いため、さまざまな構造の機器に適用することが可能です。
- 部品点数が少なく原料が安価です。
3.今後の予定
NEDOと中央大学は、本成果を可変粘弾性下肢アシスト装具Airsistシリーズの新型に適用するとともに、NEDOの別プロジェクト※4である大深度・海底や月面などの極限環境での掘削作業への適用が期待される土砂の搬送用ぜん動ポンプへの応用を検討していきます。また、中央大学発のベンチャー企業である株式会社ソラリスを通じて、Airsistの事業化を目指します。
【注釈】
- ※1 McKibben型人工筋肉
- ゴムチューブをスリーブで覆った構造の一般的な空気圧人工筋肉。ゴムチューブに空気圧を加えることでゴムチューブが膨張してスリーブを押し広げます。その際にスリーブの編み込み角度が変化して、軸方向に収縮します。
- ※2 可変粘弾性下肢アシスト装具Airsist
- ヒトの関節は拮抗配置した筋肉によって駆動されており、関節のトルクや角度だけでなく弾性と粘性を巧みに制御しながら運動しています。本アシスト装具は、人工筋肉と機能性流体デバイスを用いた新規なアシスト手法を用いています。従来のモーターによる駆動方式が、見かけ上柔軟に動作するのに対して、本手法では構造的に粘弾性を変化させることができるため、バックドライブ性に優れ、瞬発力の発生や振動制御など、多様な出力形態が可能となっています。
- ※3 広角X線回折
- 試料にX線を照射すると、散乱、回折されたX線は試料を頂点とした円錐形を描くように広がり、検出器によって強度が計測されます。試料に含まれる分子や長周期の配向状態を視覚的に理解することができ、2次元回折像が得られた角度や幅を解析することで配向の方向や度合いを求めることができます。
- ※4 別プロジェクト
- NEDO先導研究プログラム/新産業創出新技術先導研究プログラム/大深度・極限環境に適応する掘削物揚重用ぜん動ポンプの研究開発
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:渡邊、木下 TEL:044-520-5242
中央大学 理工学部中村研究室 担当:中村、奥井、小島 TEL:03-3817-1825
研究支援室 担当:矢ケ崎 TEL:03-3817-1603 E-mail:yagasaki@tamajs.chuo-u.ac.jp
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本、中里 TEL:044-520-5151 E-mail:nedo_press@ml.nedo.go.jp
関連ページ
- ロボット・AI
- 同分野のニュースリリースを探す
- 同分野の公募を探す
- 同分野のイベントを探す