革新的ロボット研究開発基盤構築事業
事業・プロジェクト概要
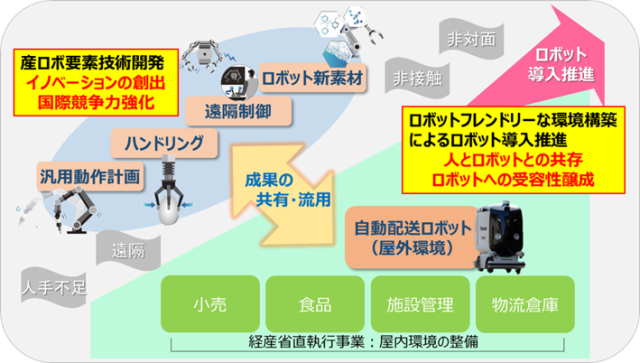
本事業では、多品種少量生産にも対応可能な産業用ロボットの実現に向け、鍵となる、「ハンドリング関連技術」「遠隔制御技術」「ロボット新素材技術」「汎用動作計画技術」等の要素技術に係る基礎・応用研究について、産業界と大学等研究機関とが協調して推進する研究開発を支援します。また、物流拠点や小売店舗などから住宅や指定地への配送サービス(ラストワンマイル物流)では、物流分野の人手不足、宅配取扱個数の急増、生活必需品などの調達ニーズの増加といった課題が顕在化しており、昨今の新型コロナウイルス感染症の拡大を契機にあらゆる産業分野で「遠隔」「非接触」「非対面」を実現することが求められている状況も踏まえて、ラストワンマイル配送におけるこれらの課題や自動配送ロボットを活用した新たなサービスの実現を目指します。
-
 概要図
概要図
研究開発内容
〔1〕ハンドリング関連技術
把持・搬送できる対象物を増やし、ロボット適用範囲を拡大することを目的に、柔軟で汎用性のある、新たなハンドリング技術の開発を行います。
〔2〕遠隔制御技術
労働人口の減少に伴う熟練工不足に対応する必要がある中、遠隔制御によるロボットの集中操作が求められており、高臨場感が得られる遠隔制御技術や遠隔操作支援技術の確立を目指します。
〔3〕ロボット新素材技術
複合材料化や樹脂化等により重要素材の軽量化を実現し、ロボット新素材技術による省エネルギー化や導入コストの低減への貢献を目指します。
〔4〕汎用動作計画技術
ロボット作業に関わるデータベースの構築や、自動的かつ汎用的なロボットの動作計画技術に関する研究開発を行い、ロボット導入コストの削減を目指します。
〔5〕自動配送ロボットによる配送サービスの実現
自動配送サービスの実現のために、同時に複数台のロボットを監視できるシステムを開発し、適切なリスクアセスメントを行った上で自動配送実証試験を行います。




プロジェクトリーダー
原田 研介(国立大学法人 大阪大学 大学院基礎工学研究科システム創成専攻 教授)※研究開発項目〔1〕~〔4〕
関連成果
(1)自動配送ロボットの活用の手引き
自動配送ロボットを活用した配送サービスの社会実装をより一層推進するためには、小売事業者、物流事業者、地方公共団体等といったサービス提供者が参入しやすい市場を形成する必要があります。
新たに自動配送ロボットを活用しようとするサービス提供者が、活用開始までのプロセスや関係法令等を一元的に把握し、サービス提供の具体的な企画を行いやすくなることを目的として、『自動配送ロボット活用の手引き』を作成しました。
- 第1章 本手引きと自動配送ロボットについて
- 第2章 自動配送ロボットにまつわるFAQ
- 第3章 自動配送ロボット活用までのプロセスとアクション
- 第4章 自動配送ロボットの活用事例集
- 第5章 関係法令及び参照すべきマニュアル等

基本情報
| 事業期間・予算額 | 事業期間:2020年度~2024年度、予算額:5.5億円(2024年度) |
|---|---|
| 技術・事業分野 | ロボット |
| プロジェクトコード | P20016 |
| 担当部署 | AI・ロボット部 (TEL:044-520-5241) |
詳細資料
- 基本計画(596KB)
- 実施方針:2024年度版(912KB)
- 実施方針:2023年度版(536KB)
- 実施方針:2022年度版(602KB)
- 実施方針:2021年度版(1000KB)
- 実施方針:2020年度版(310KB)
最終更新日:2024年12月25日