無人航空機衝突回避システムの国際規格ISO15964が発行されました
―NEDOの研究開発成果がシステムの標準化に貢献しました―
2025年5月8日
NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)
日本無線株式会社
日本アビオニクス株式会社
株式会社ACSL
株式会社三菱総合研究所
NEDOの委託事業「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」(以下、NEDO DRESSプロジェクト)での成果をもとに、日本無線株式会社、日本アビオニクス株式会社、株式会社ACSL、株式会社三菱総合研究所は、無人航空機の衝突回避システムの標準化に取り組んできました。
2025年4月25日に、無人航空機の衝突回避システムに関する国際規格が、国際標準化機構(ISO)より「ISO15964 Detection and avoidance systems for uncrewed aircraft systems」(以下、本規格)として正式に発行されました。本規格は、「ISO21384-3 Unmanned aircraft systems―Part3: Operational procedures」(無人航空機システム―第3部 運航手順)を具現化するための衝突回避システムに使用されるセンサーなどの要件を規定しており、日本からはNEDO DRESSプロジェクトで行われたさまざまな実証実験成果を取りまとめた技術報告書「ISO/TR 23267: Experiment results on test methods for detection and avoidance (DAA) systems for unmanned aircraft systems」を根拠として、有人ヘリコプターとの衝突回避などを想定したユースケースを盛り込みました。
今後、ドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などを本規格に基づいて行うことで、グローバルな情報共有や技術開発、社会実装の加速が見込まれます。今回、無人航空機と他の航空機、あるいは無人航空機同士の衝突回避システムが国際標準化されたことで、技術開発の方向性を統一することが可能になるとともに、社会実装に向けた各国の取り組みが加速し、幅広いサービスの実現につながることが期待できます。
1.背景
一般にドローンと呼ばれる小型から中型の無人航空機は、既に農業分野などで利用が広がっており、さらには災害時の物資運搬や遭難者捜索、物流インフラなどの用途での活用に、大きな期待が寄せられています。一方で、無人航空機とドクターヘリなど、有人航空機とのニアミス実例※1が国内で報告されるなど、他の航空機との衝突をどのように回避するかが無人航空機の安全利用における喫緊の課題です。
NEDO DRESSプロジェクト※2では、2017年度から無人航空機の衝突回避技術の開発を開始し、2021年度までにさまざまな実証実験を行い、衝突回避技術に関する複数の研究開発成果を公開してきました。
この成果をもとにした日本発の提案により、2023年10月、無人航空機の運航手順の規格である「ISO 21384-3:2023 Unmanned aircraft systems Part 3: Operational procedures※3」(以下、ISO 21384-3:2023)に衝突回避CONOPS (Concept of Operations:運用構想)が新たな章として追加され、6ステップからなる基本的な衝突回避手順が規定されました。さらに、2024年4月15日には、技術報告書ISO/TR 23267※4が公開されています。
2.NEDO DRESSプロジェクトの成果
本規格ISO 15964※5は、ISO 21384-3:2023で規定された「対象物の探知」、「ターゲットの認識」、「回避機動」、「回避結果の確認」、「元ルートへの復帰」および「元ルートでの飛行」の6ステップからなる基本的な衝突回避手順を具現化する衝突回避システムの基本アーキテクチャを規定しています。
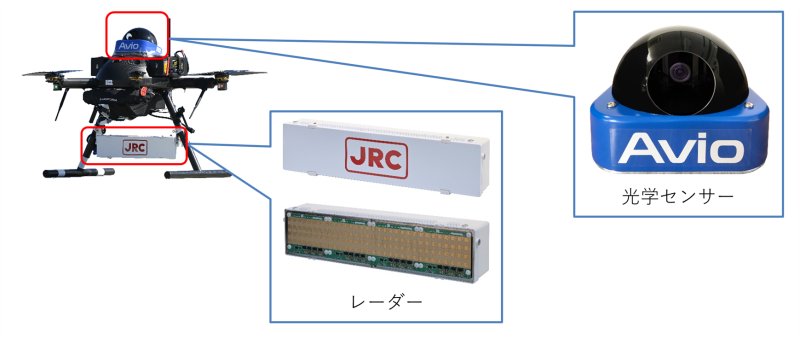
さらに、本規格は短距離衝突回避システム、中長距離衝突回避システムなど、アプリケーションに応じた構成となっており、日本からは有人航空機などとの衝突回避を想定した中長距離のユースケースへの対応を盛り込みました。具体的には、無人航空機に搭載されるレーダーと光学センサーを備える衝突回避システムについて衝突回避CONOPSの6ステップにおける各種センサー機器の役割や探知・認識距離などを規定しています。
| 衝突回避の運用手順 (ISO 21384-3:2023) |
衝突回避システム (ISO 15964) |
|
|---|---|---|
| ステップ | 操作 | ハードウエア・ソフトウエア |
| 1 | 対象物の探知 | レーダー |
| 2 | ターゲットの認識 | 光学センサー(カメラ) |
| 3 | 回避機動 | 処理装置 |
| 4 | 回避結果の確認 | 光学センサー(カメラ) |
| 5 | 元ルートへの復帰 | 光学センサー(カメラ) |
| 6 | 元ルートでの飛行 | 処理装置 |
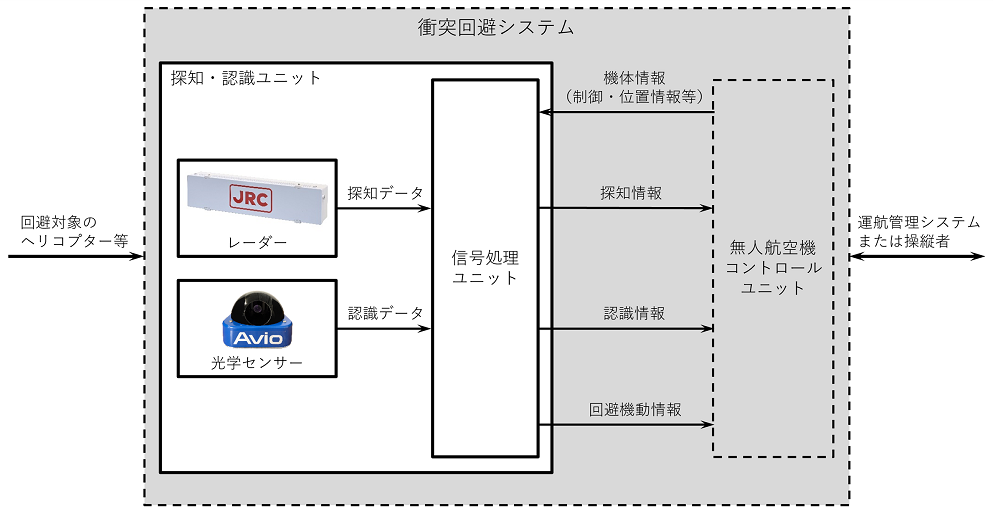
図2 中長距離衝突回避システムの基本アーキテクチャ
各種センサー機器の役割や探知・認識距離についての要求事項は、日本無線と三菱総合研究所がNEDO DRESSプロジェクトで実施したさまざまな実証実験などの研究開発成果を取りまとめ、日本発として提案したISO/TR 23267がその根拠と位置付けられています。
また、レーダーを搭載できない小型の無人航空機におけるユースケースへの対応として、光学センサーのみをセンサーとして使用するアーキテクチャについても規定し、ISO/TR 23267の根拠をもとに衝突回避CONOPSの6ステップにおける各種センサー機器の役割や探知・認識距離などを規定しています。
| 衝突回避技術 | 衝突回避オペレーション (ISO 21384-3:2023) |
|
|---|---|---|
| 無人航空機の衝突回避技術に関する技術報告書 (ISO/TR 23267:2024) |
|
|
| 衝突回避センサー (ISO 15964) |
|
*2023年度成果報告書 情報収集費/NEDOにおける標準の戦略的活用に資する事例等調査をもとに日本無線が作成。次のurlより資料を取得できます。(https://www.nedo.go.jp/seika_hyoka/database_index.html)
| 日本無線 | 衝突回避システムの取りまとめ レーダーの開発 ISO 15964の規格案の作成 |
| 日本アビオニクス | 光学センサーの開発 |
| ACSL | 処理装置の開発 |
| 三菱総合研究所 | ISO 15964の国際標準化活動支援 |
3.成果の社会への波及
衝突回避手順の技術運用の標準化を受け、根拠となる文書をもとにそれを具現化するシステムの標準化が行われたことで、今後、規制当局の法制化が加速し、さらなる空の安全確保が図られ、より広範な用途においてドローンが活躍する省エネルギー社会の実現が期待されます。
【注釈】
- ※1 有人航空機とのニアミス実例
- 「航空機と無人航空機、無人航空機同士の 衝突回避策等について(国土交通省 航空局 2016年11月8日)」のp.16を参照しています。
- ※2 NEDO DRESSプロジェクト
- NEDOが2017年度から2022年度の期間で推進した、【1】ロボット・ドローン機体の性能評価基準等の開発、【2】無人航空機の運航管理システム及び衝突回避技術の開発、【3】ロボット・ドローンに関する国際標準化の推進、【4】空飛ぶクルマの先導調査研究の4項目で構成した、省エネルギー社会の実現を目指したプロジェクトです。
事業概要:ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト - ※3 ISO 21384-3:2023 Unmanned aircraft systems Part 3: Operational procedures
- 概要:ISO 21384-3:2023
(参考)NEDOリリース「無人航空機の衝突回避に関する日本発提案が国際規格の改定版に採択・発行」(2023年10月6日) - ※4 ISO/TR 23267
- 概要:ISO/TR 23267:2024
(参考)NEDOリリース「日本発の無人航空機の衝突回避に関する技術報告書がISOより公開」(2024年4月22日) - ※5 ISO 15964
- 概要:ISO 15964:2025
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO 航空・宇宙部 E-mail:aero_admi[*]ml.nedo.go.jp
日本無線 事業推進部 担当:廣瀬、百瀬 TEL:03-6832-0721 E-mail:pr[*]jrc.co.jp
日本アビオニクス 広報担当:吉武、藤原 TEL:045-287-0300
ACSL 広報担当 TEL:03-6456-0931
三菱総合研究所 モビリティ・通信事業本部 担当:桑島、川畑 TEL:03-6858-3729
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 経営企画部 広報企画・報道課 TEL:044-520-5151 E-mail:nedo_press[*]ml.nedo.go.jp
E-mailは上記アドレスの[*]を@に変えて使用してください。
- ※新聞、TVなどで弊機構の名称をご紹介いただく際は、“NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)”または“NEDO”のご使用をお願いいたします。